
光電センサ
バナーは、世界で最も完全な光電センサ製品ラインを取り揃えており、フォーチュン500にランクインする、実質すべての製造会社にセンサを提供しています。
| Series Image | Series Name | Opposed Range (m) | Non-polarized Retroreflective Range (m) | Polarized Retroreflective Range (m) | Laser Polarized Retroreflective Range (m) | Diffuse Range (mm) | Fixed-Field Range (mm) | Adjustable-Field Range (mm) | Type of Emitter | Housing Material | IP Rating | Response Time (μs) | Operating Temperature | IO-Link | Clear Object Detection |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
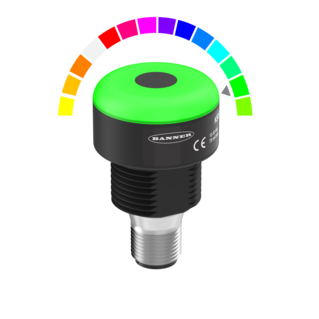
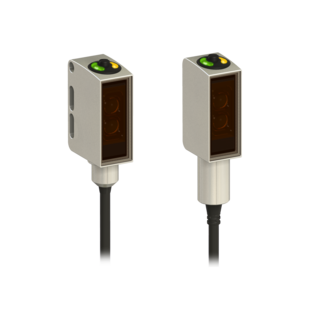
Series Image  |
Series Name QS18 | Opposed Range (m) 20 | Non-polarized Retroreflective Range (m) 6.5 | Polarized Retroreflective Range (m) 3.5 | Laser Polarized Retroreflective Range (m) 10 | Diffuse Range (mm) 600 | Fixed-Field Range (mm) 200 | Adjustable-Field Range (mm) 350 | Type of Emitter LED and Laser | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 600–800 | Operating Temperature -20 to +70 °C | IO-Link ✅ YES | Clear Object Detection ✅ YES |
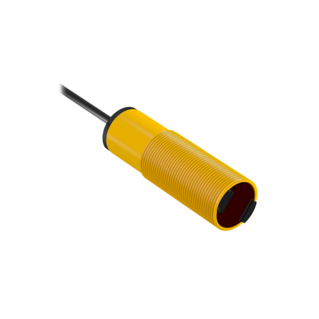
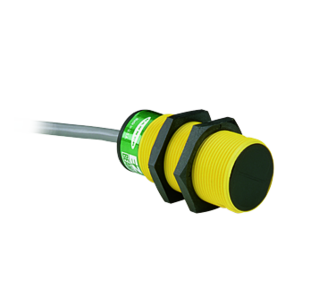
Series Image  |
Series Name Q20 | Opposed Range (m) 20 | Non-polarized Retroreflective Range (m) 6 | Polarized Retroreflective Range (m) 4 | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) 1500 | Fixed-Field Range (mm) 150 | Adjustable-Field Range (mm) 400 | Type of Emitter LED | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 850–1000 | Operating Temperature -20 to +60 °C | IO-Link ✅ YES | Clear Object Detection 🚫 NO |
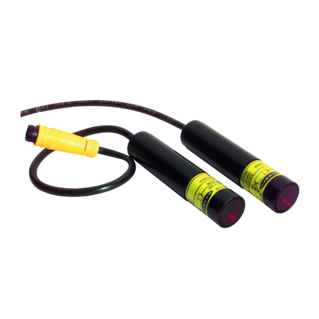
Series Image  |
Series Name QS30 | Opposed Range (m) 60 | Non-polarized Retroreflective Range (m) 12 | Polarized Retroreflective Range (m) 8 | Laser Polarized Retroreflective Range (m) 18 | Diffuse Range (mm) 1400 | Fixed-Field Range (mm) 600 | Adjustable-Field Range (mm) 600 | Type of Emitter LED and Laser | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 2000–5000 | Operating Temperature -20 to +70 °C | IO-Link 🚫 NO | Clear Object Detection ✅ YES |
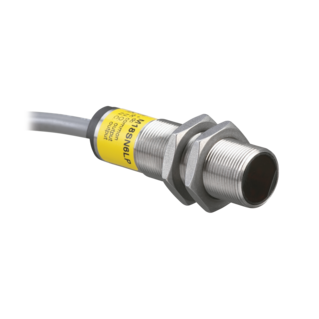
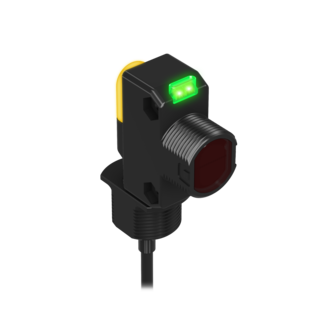
Series Image  |
Series Name T18-2 | Opposed Range (m) 25 | Non-polarized Retroreflective Range (m) — | Polarized Retroreflective Range (m) 6 | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) 750 | Fixed-Field Range (mm) 200 | Adjustable-Field Range (mm) — | Type of Emitter LED | Housing Material Plastic | IP Rating IP67, IP68, IP69K | Response Time (μs) 1500–2000 | Operating Temperature -40 to +70 °C | IO-Link 🚫 NO | Clear Object Detection 🚫 NO |
Series Image  |
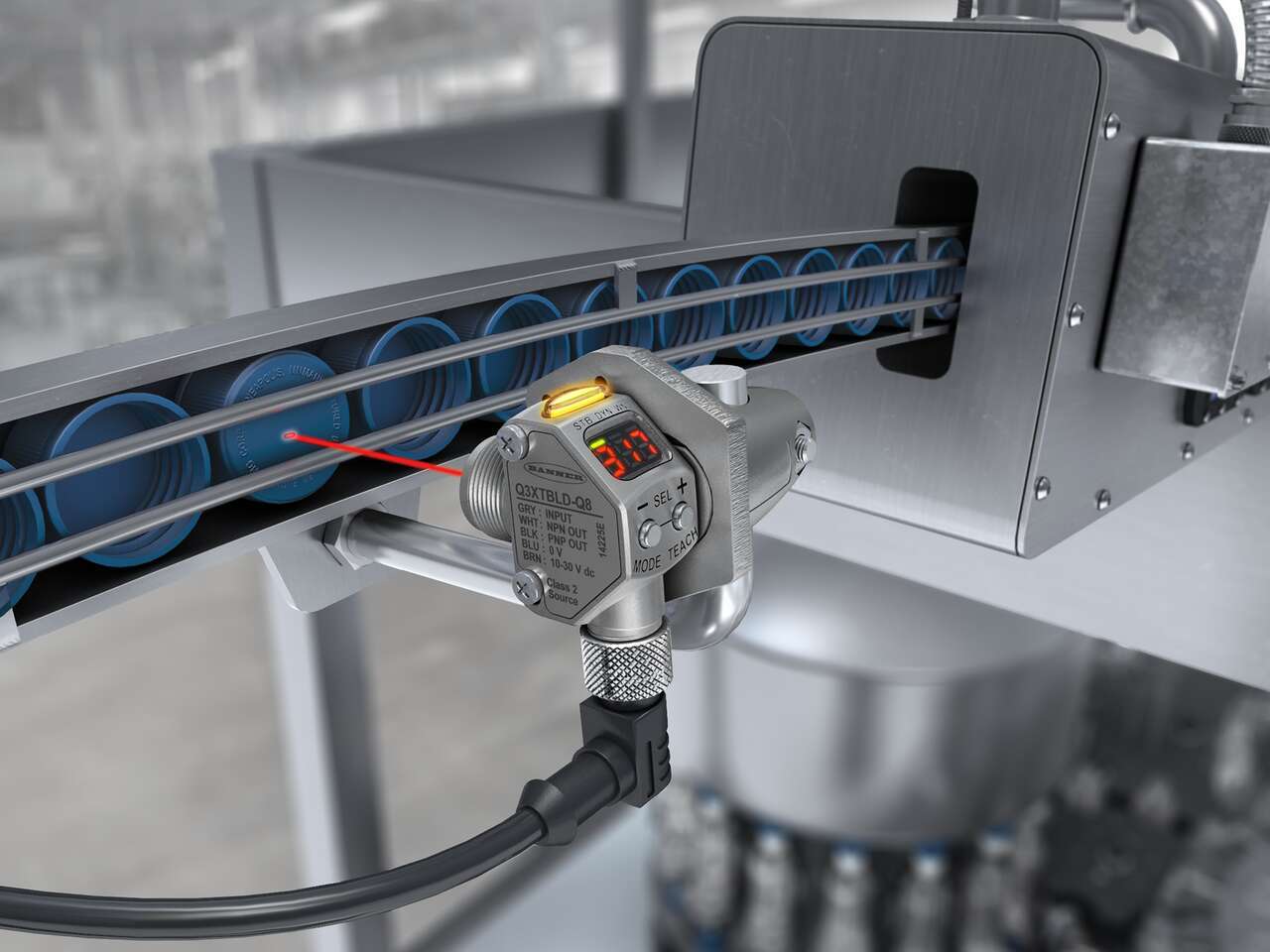
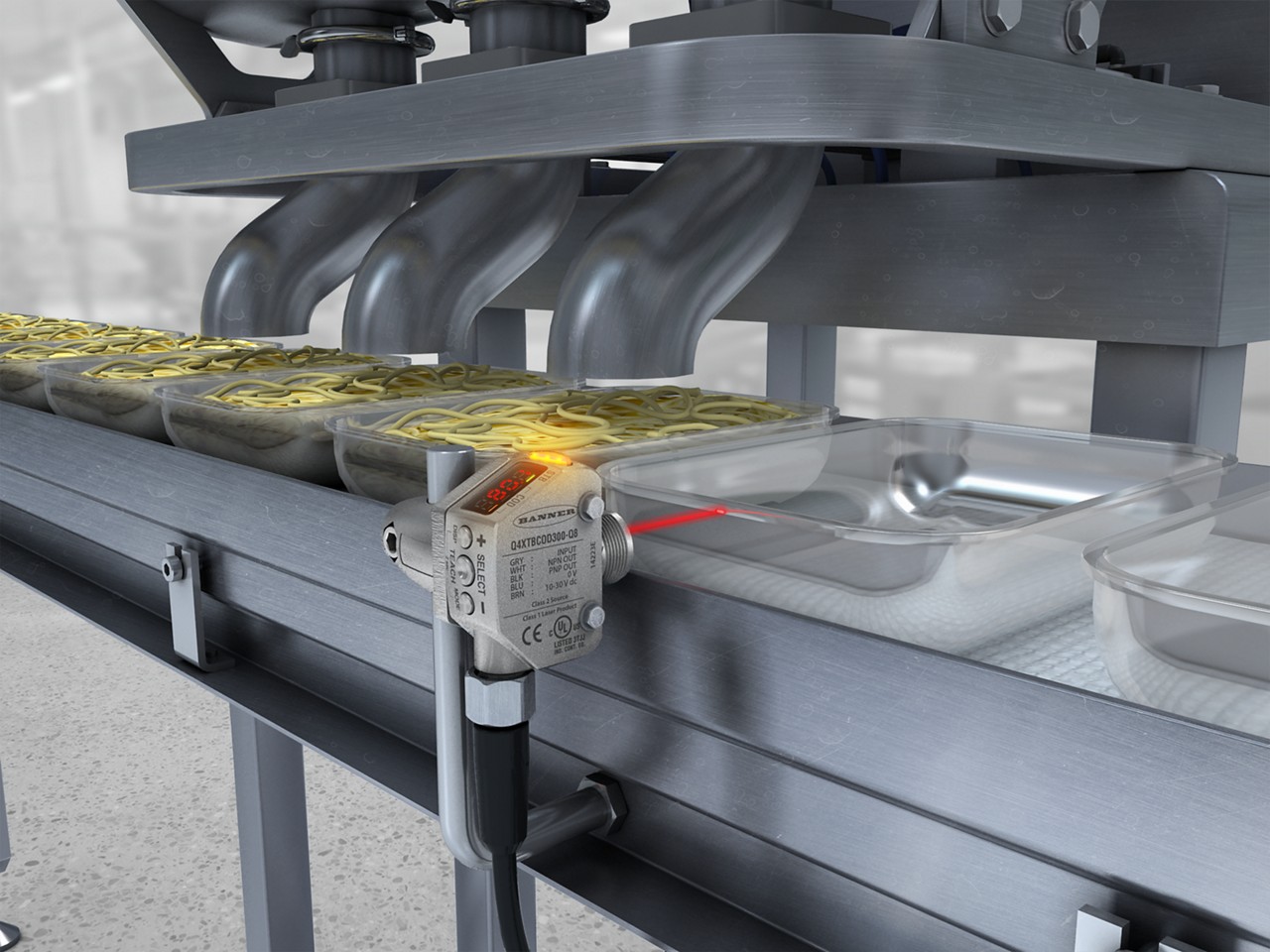
Series Name Q3X | Opposed Range (m) — | Non-polarized Retroreflective Range (m) — | Polarized Retroreflective Range (m) — | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) 300 | Fixed-Field Range (mm) 200 | Adjustable-Field Range (mm) — | Type of Emitter Laser | Housing Material Metal | IP Rating IP67, IP68, IP69K | Response Time (μs) 250 | Operating Temperature -10 to +50 °C | IO-Link 🚫 NO | Clear Object Detection 🚫 NO |
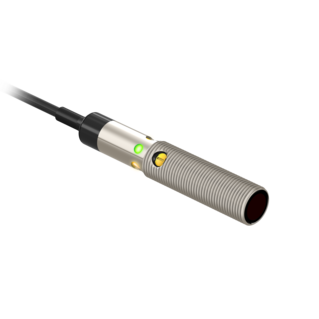
Series Image  |
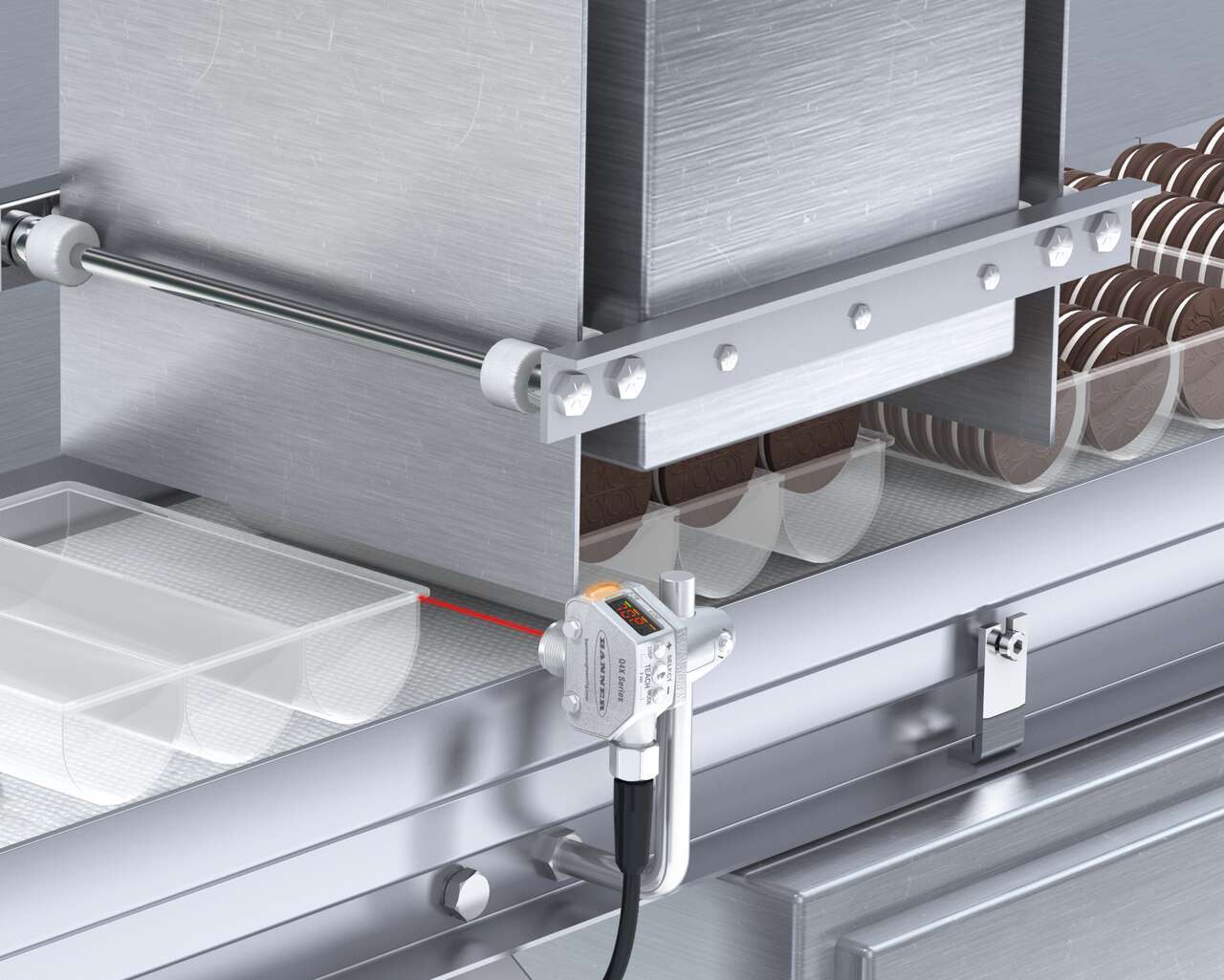
Series Name Q2X | Opposed Range (m) 3 | Non-polarized Retroreflective Range (m) — | Polarized Retroreflective Range (m) 3.3 | Laser Polarized Retroreflective Range (m) — | Diffuse Range (mm) — | Fixed-Field Range (mm) 50 | Adjustable-Field Range (mm) 3000 | Type of Emitter LED and Laser | Housing Material Plastic | IP Rating IP67 | Response Time (μs) 600–100,000 | Operating Temperature -25 to +50 °C | IO-Link ✅ YES | Clear Object Detection ✅ YES |






































Photoelectric Applications
-
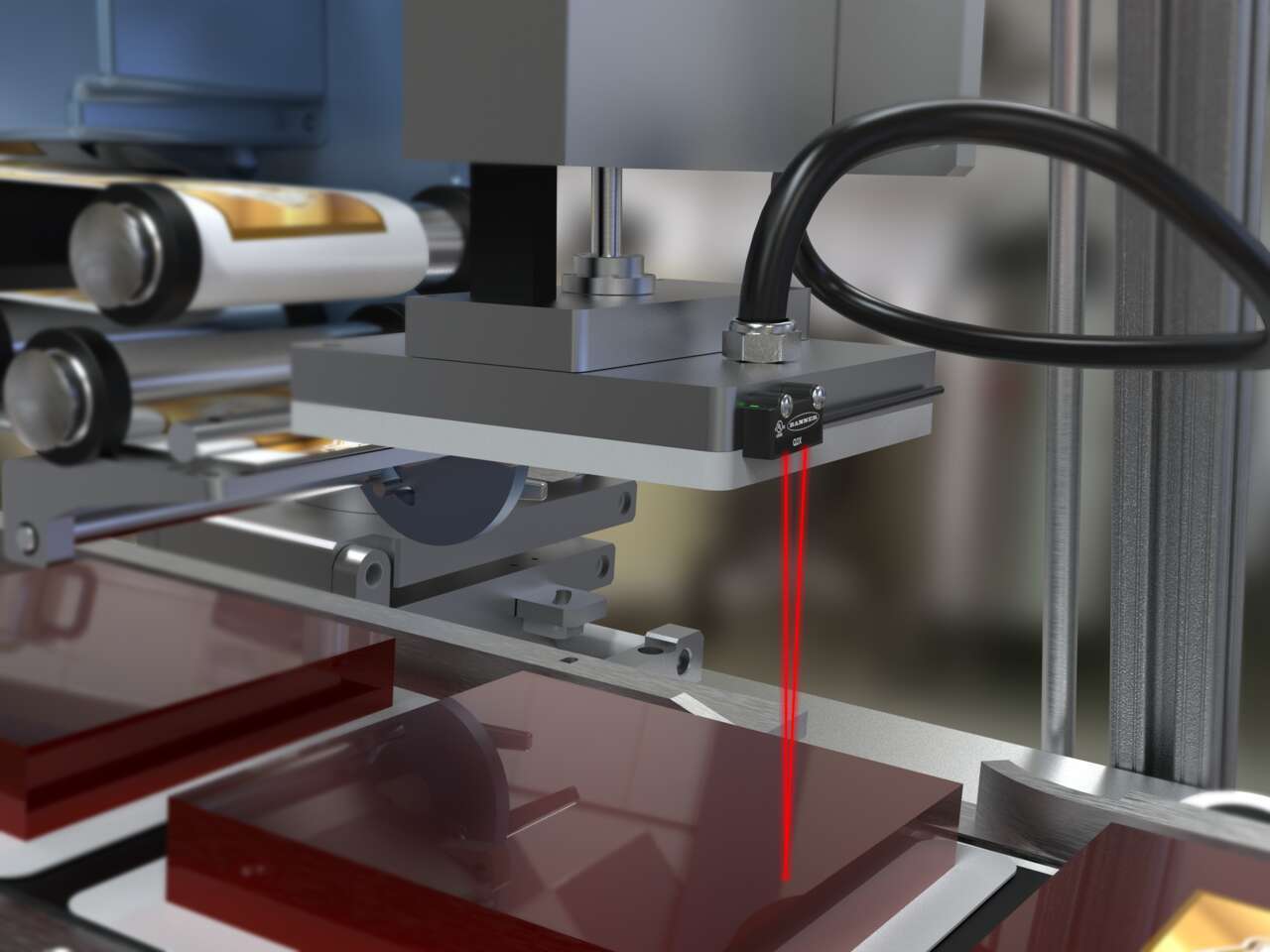
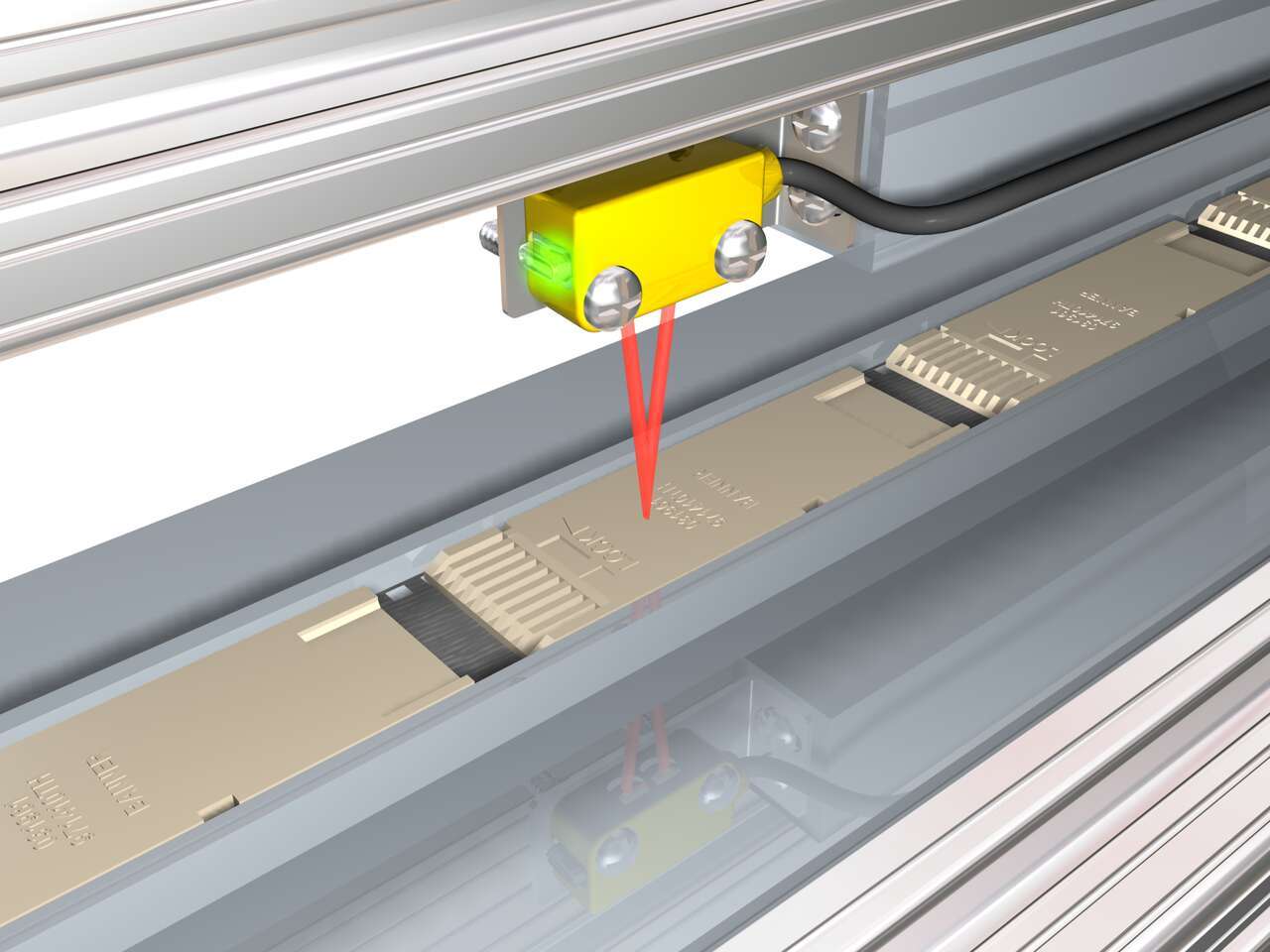
Dark Wafer Presence Detection
-
Streamline Labeling Process with a Fixed-Field Sensor
-
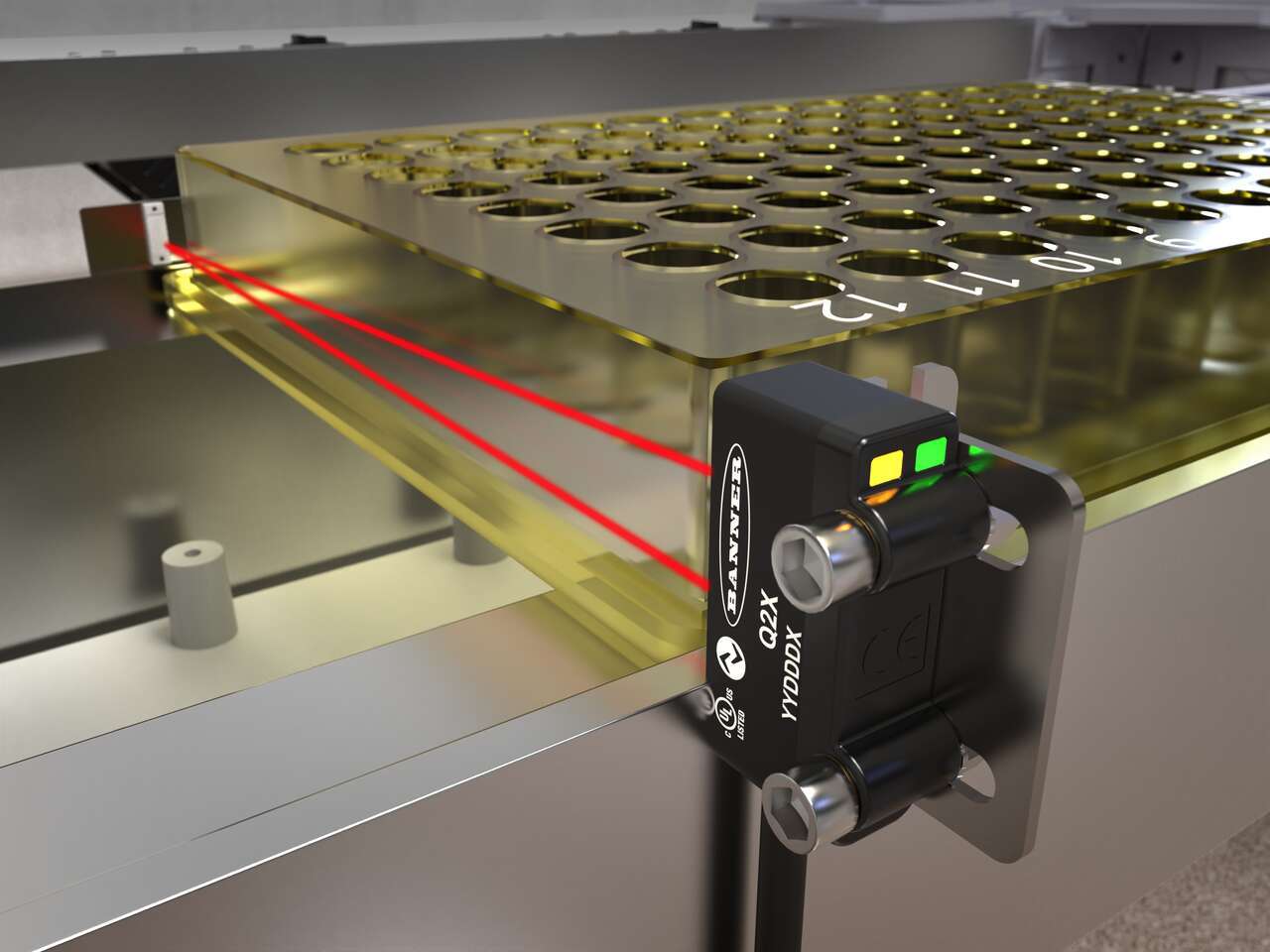
Accurate Positioning in Medical & Scientific Laboratories
-

Preventing Jams in Airport Baggage Retrieval Systems
-

Status Indication on Airport Conveyor
-

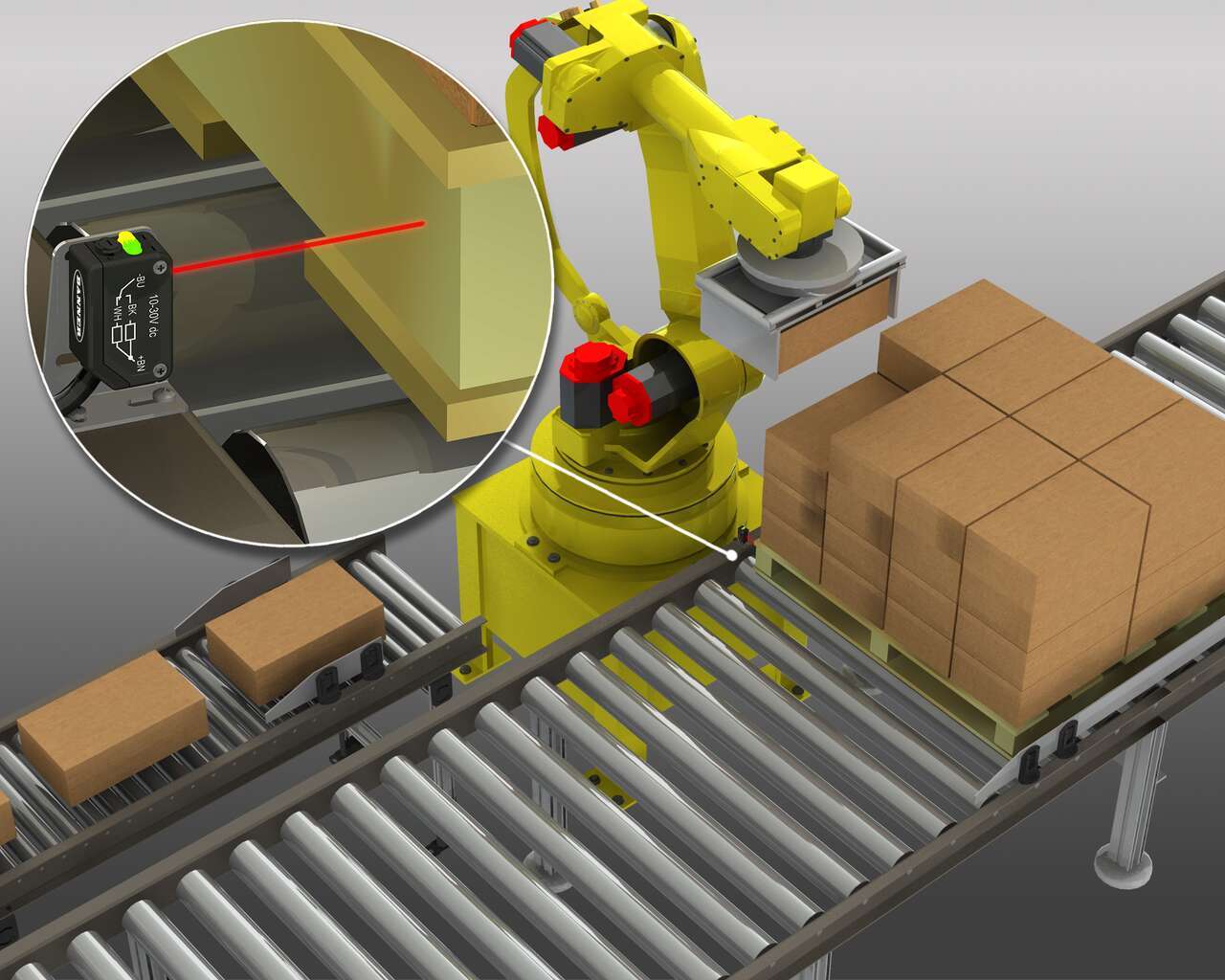
Positioning Pallets for Unloading by Robot Arms
-

フォークリフトの照光式誘導
-

Jam Detection on a Conveyor with Only AC Power
-

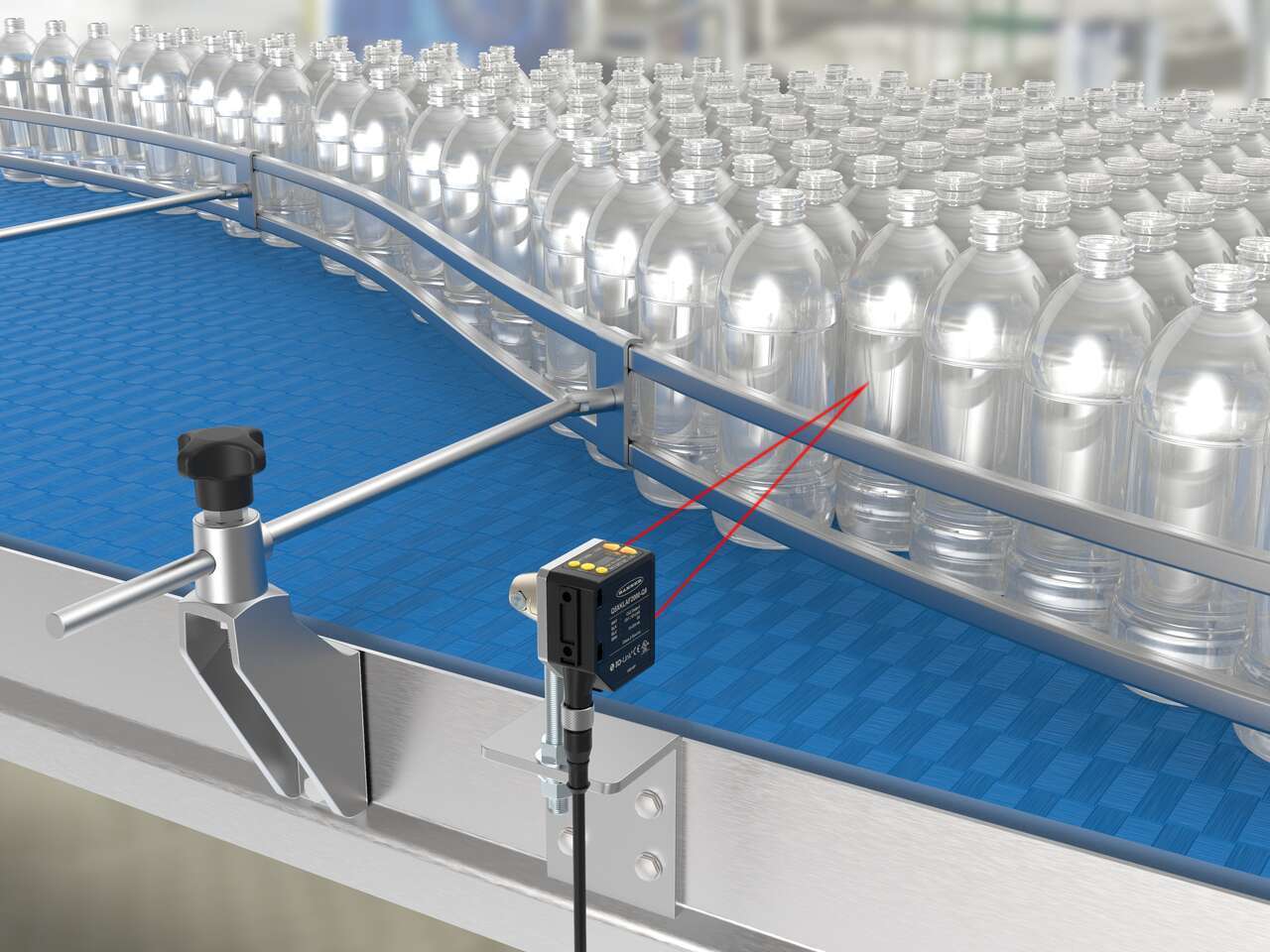
コンベアに沿って透明プラスチックボトルを確実に検出
-

オペレータ誘導ソリューション
-
![Shrink Sleeve Labeling at High Speeds [Success Story]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2013/QS18VN6LLPQ5-Shrink-Sleeve-Bottle-Labeling.psd/jcr:content/renditions/cq5dam.web.1280.1280.jpeg)
Shrink Sleeve Labeling at High Speeds [Success Story]
-
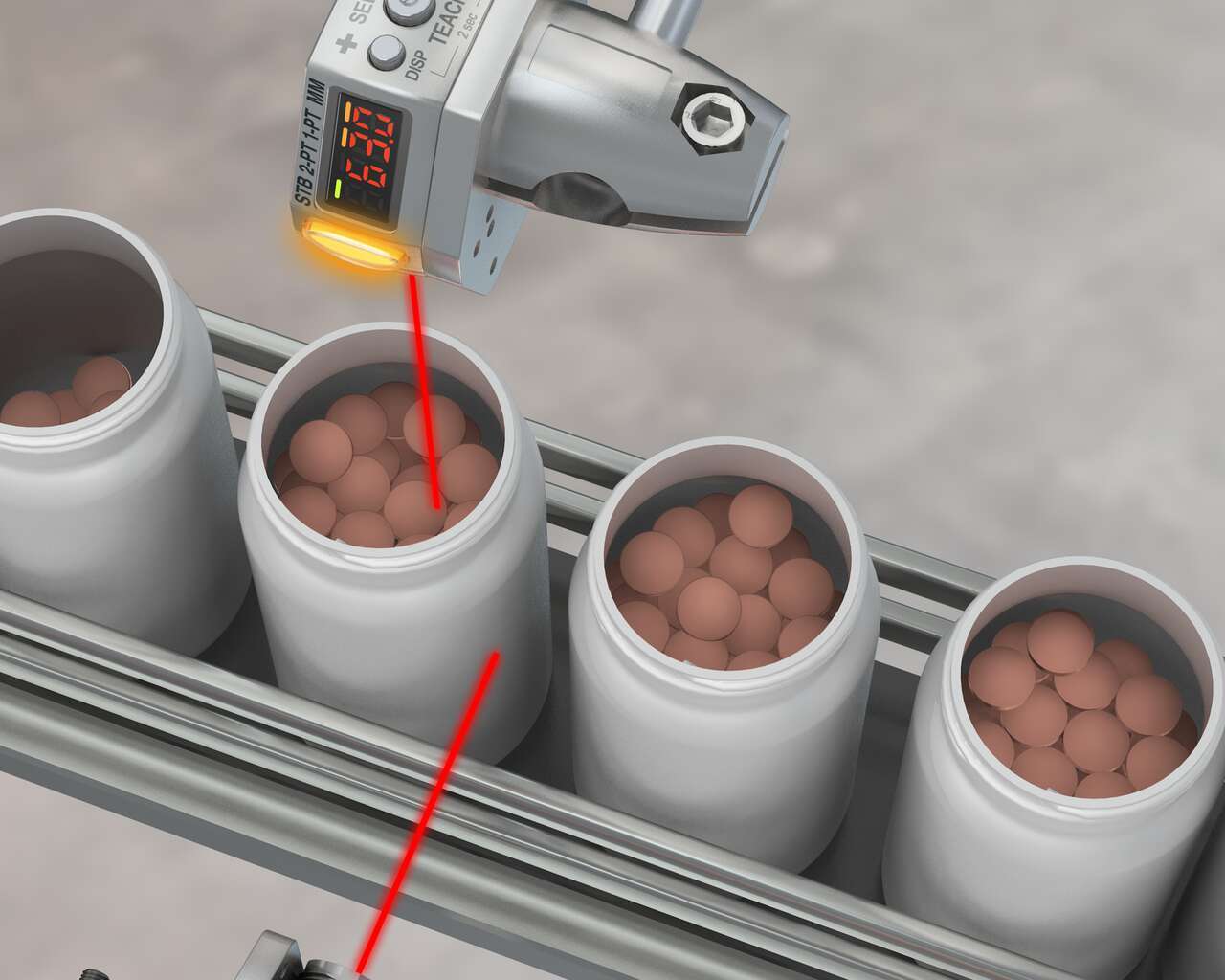
![青色LEDセンサによるアンバーボトル検出 [成功事例]](/content/dam/banner-engineering/3d-renders/application-notes/wcc-migration/2010/QS18LV-Solid-Dose-Pkng---Perscription-Vial-Detect.psd/jcr:content/renditions/cq5dam.web.1280.1280.jpeg)
青色LEDセンサによるアンバーボトル検出 [成功事例]
-
ボトルの充填レベルの検出
-

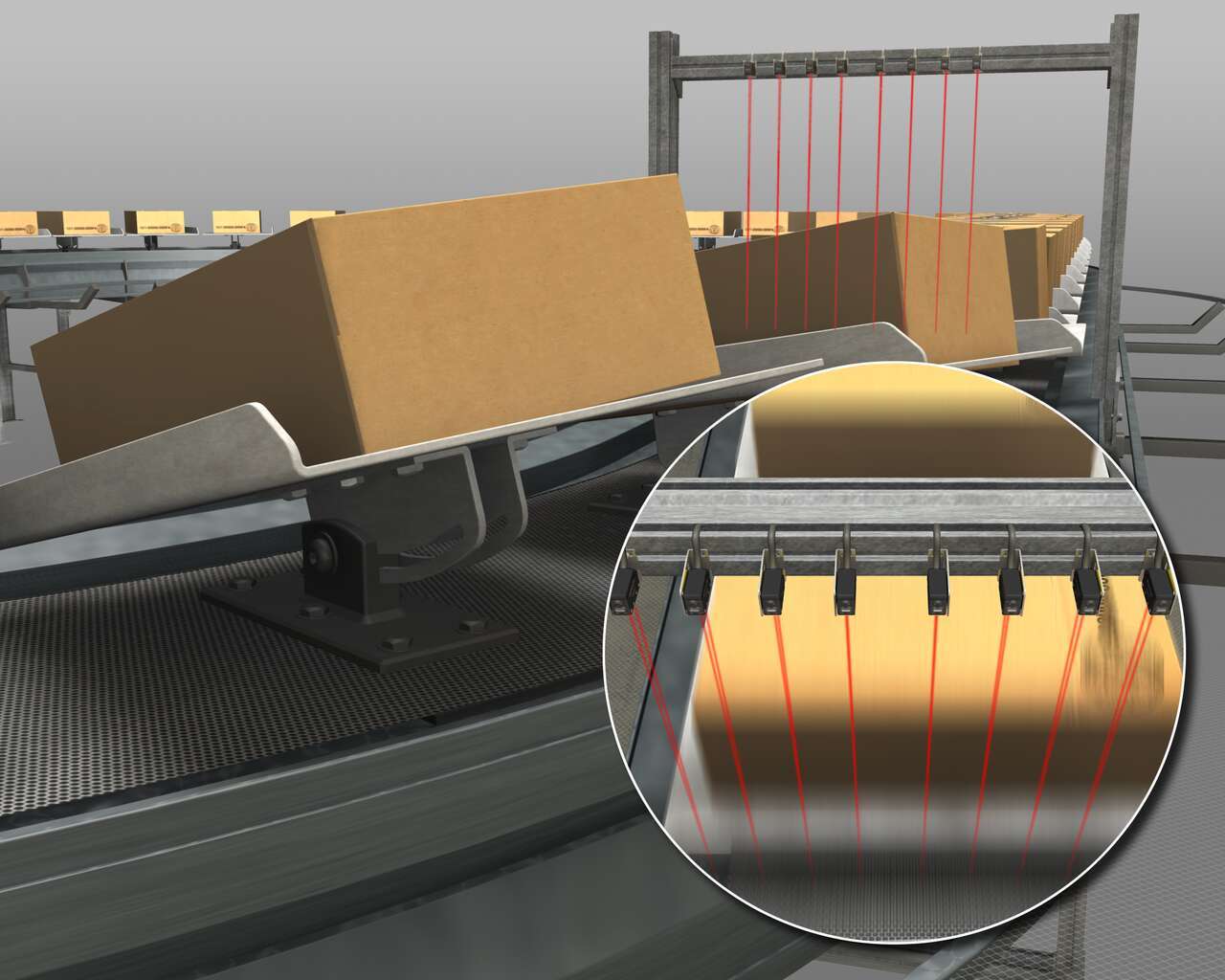
カートンのスタック高さ
-

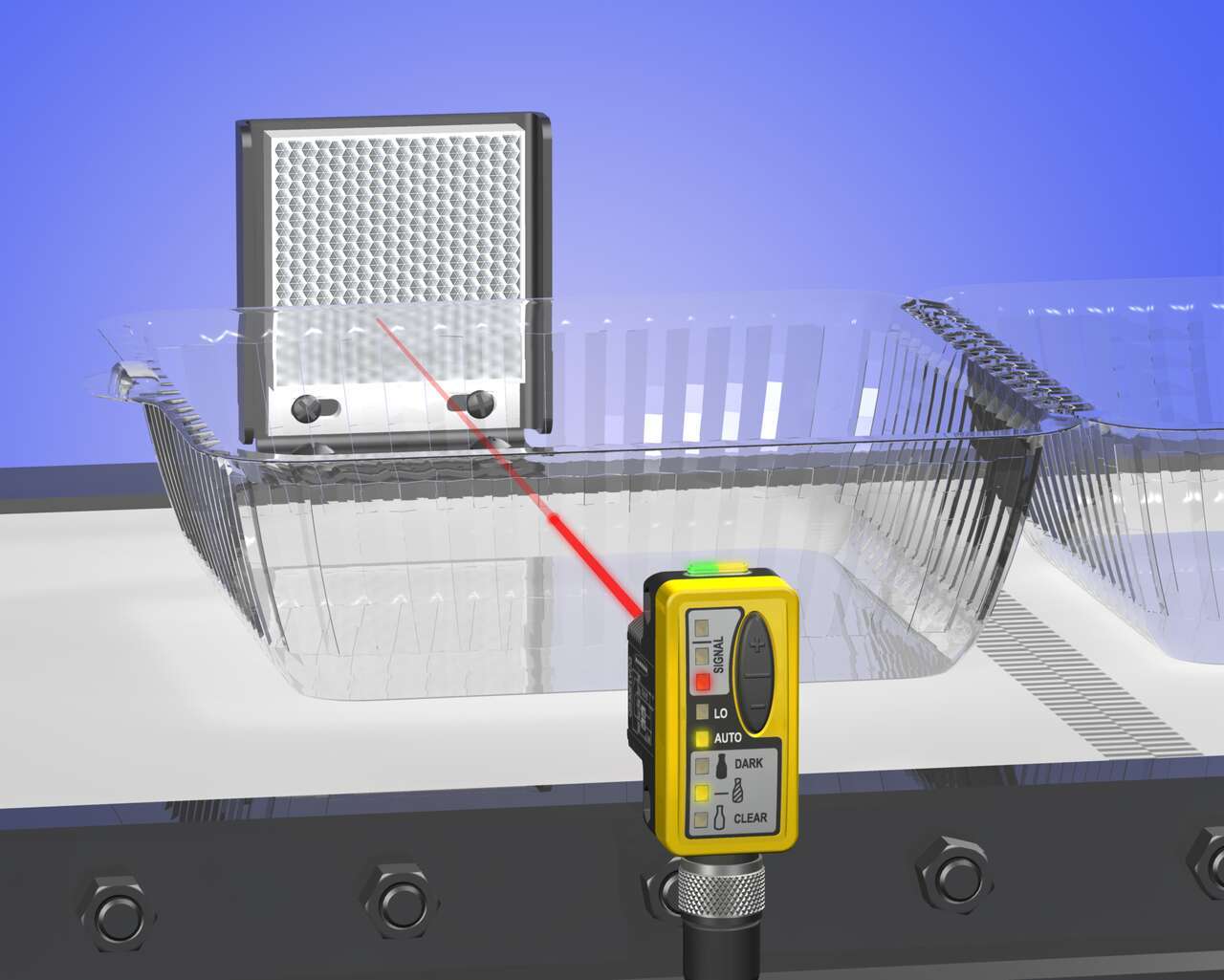
デネスターのプラスチックトレイレベルの監視
-

充填レベルの非接触確認
-
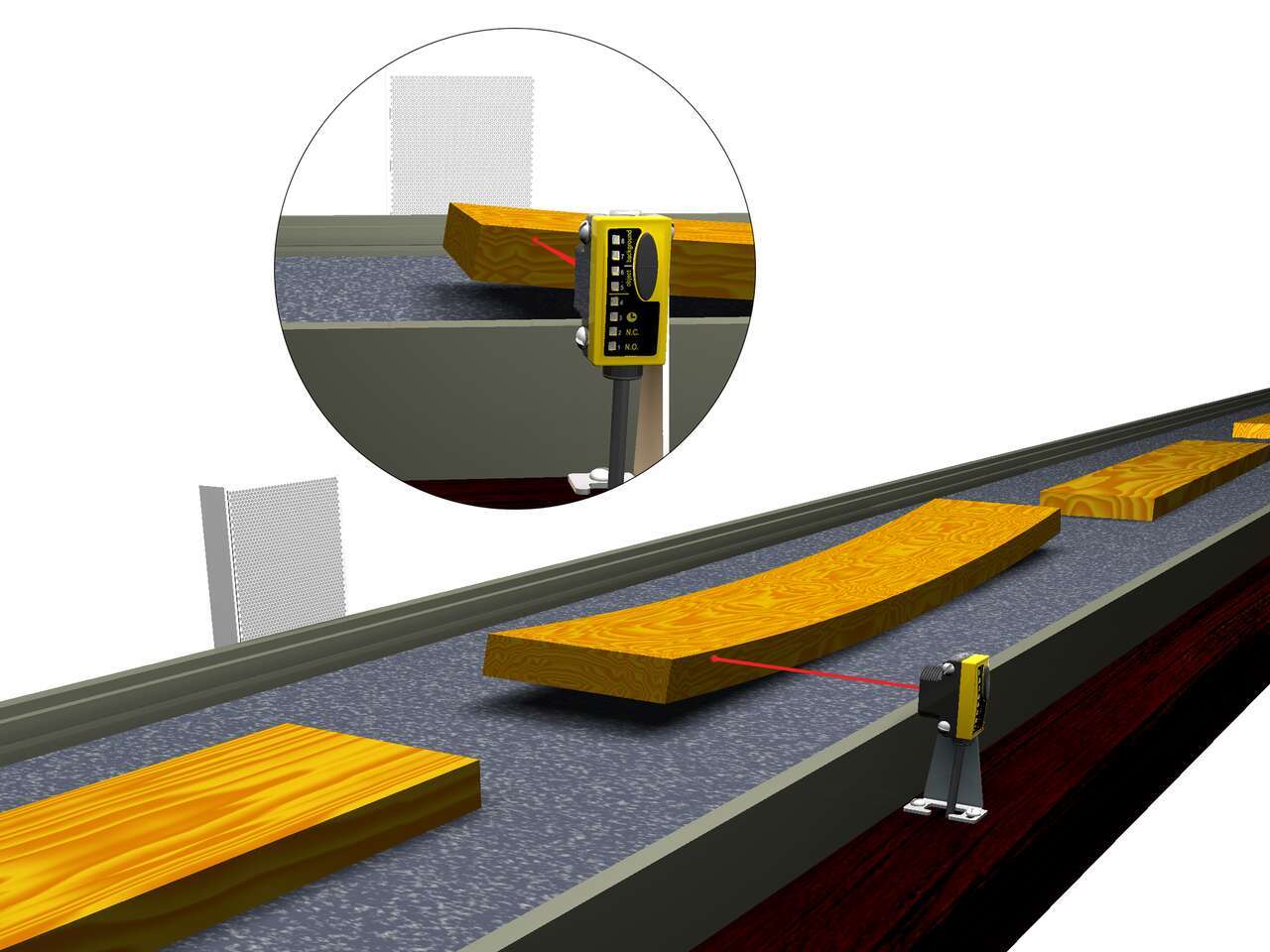
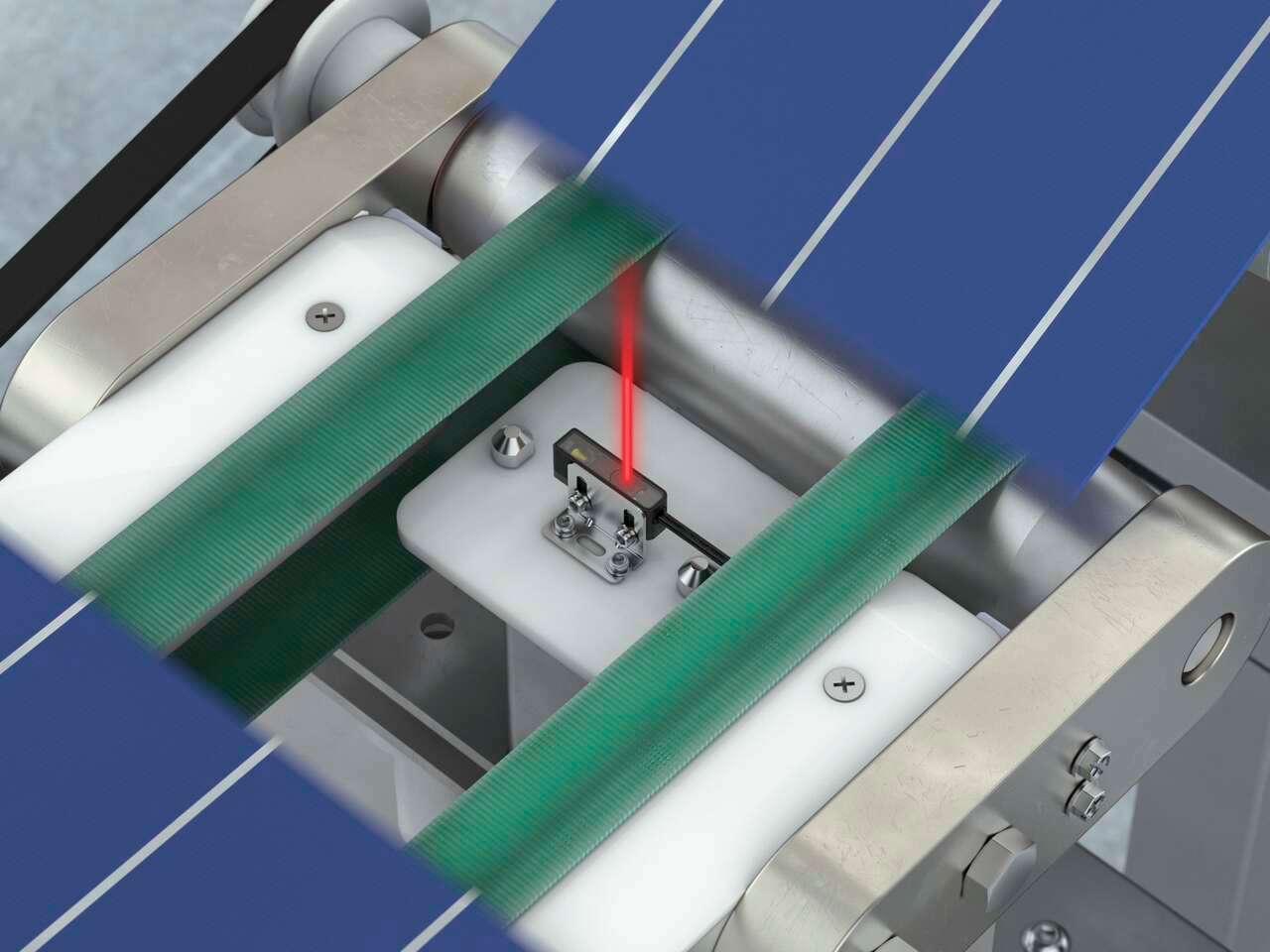
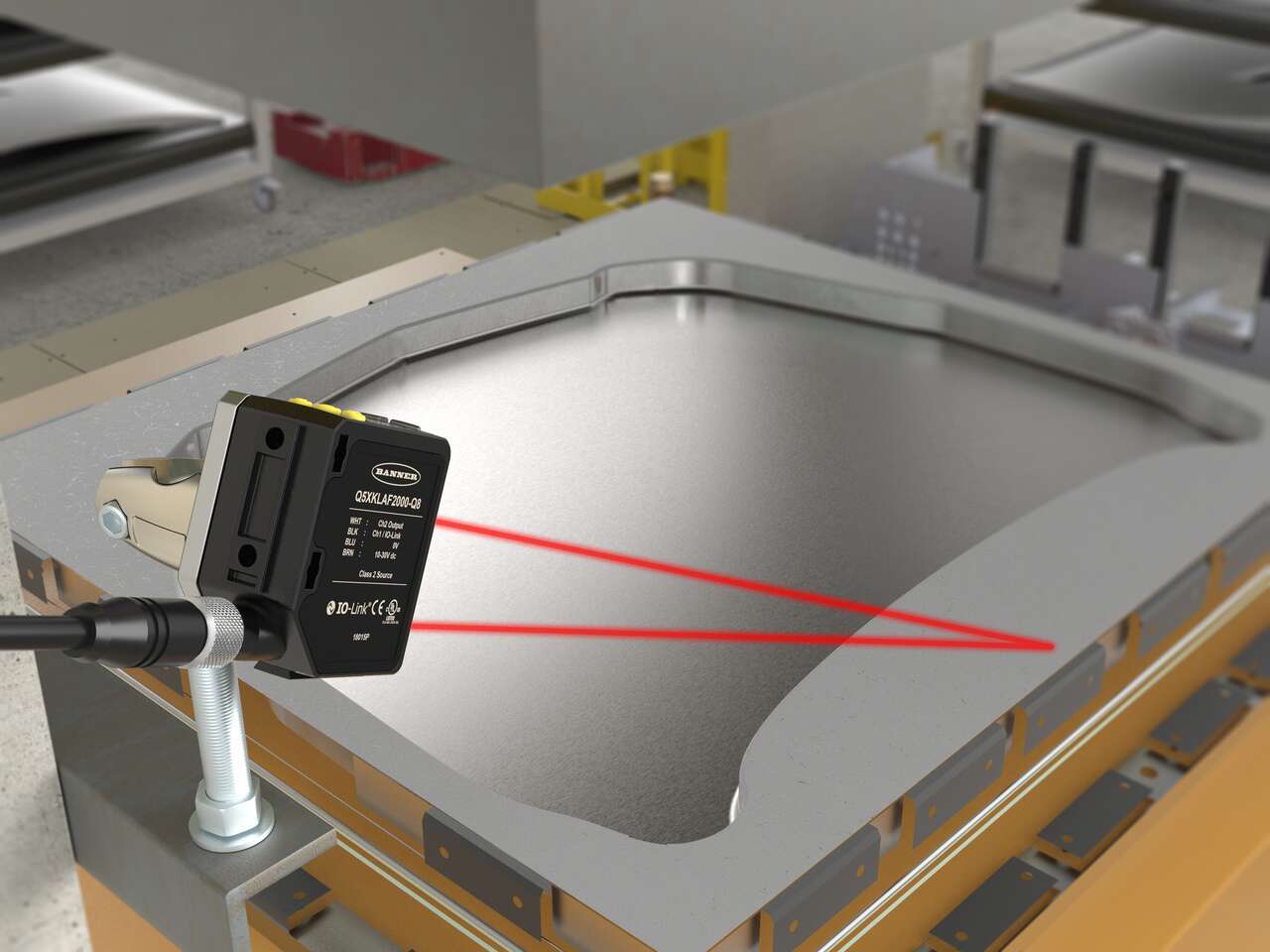
QS30を使用した板の歪みの検出
-
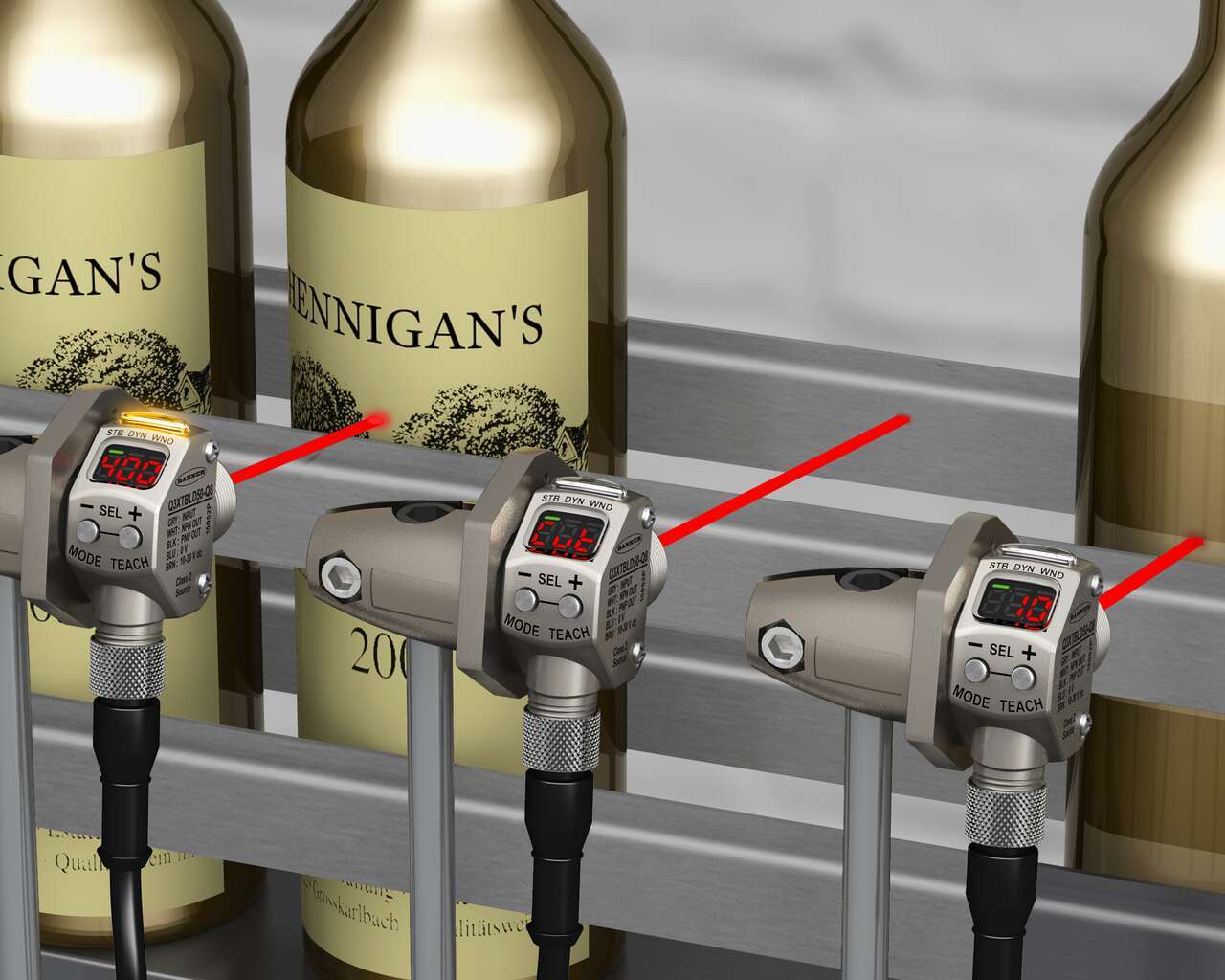
ボトルラベルの検査
-

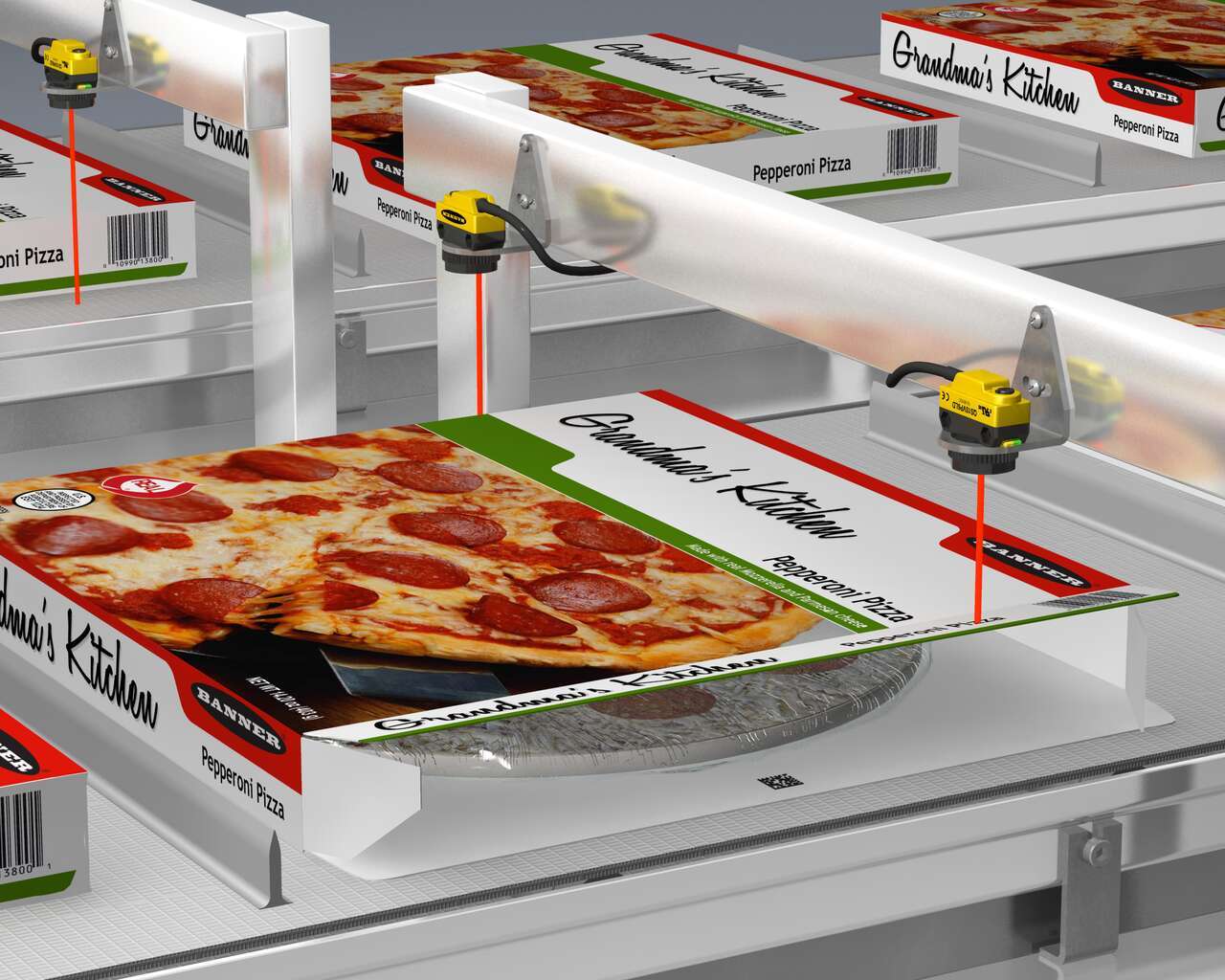
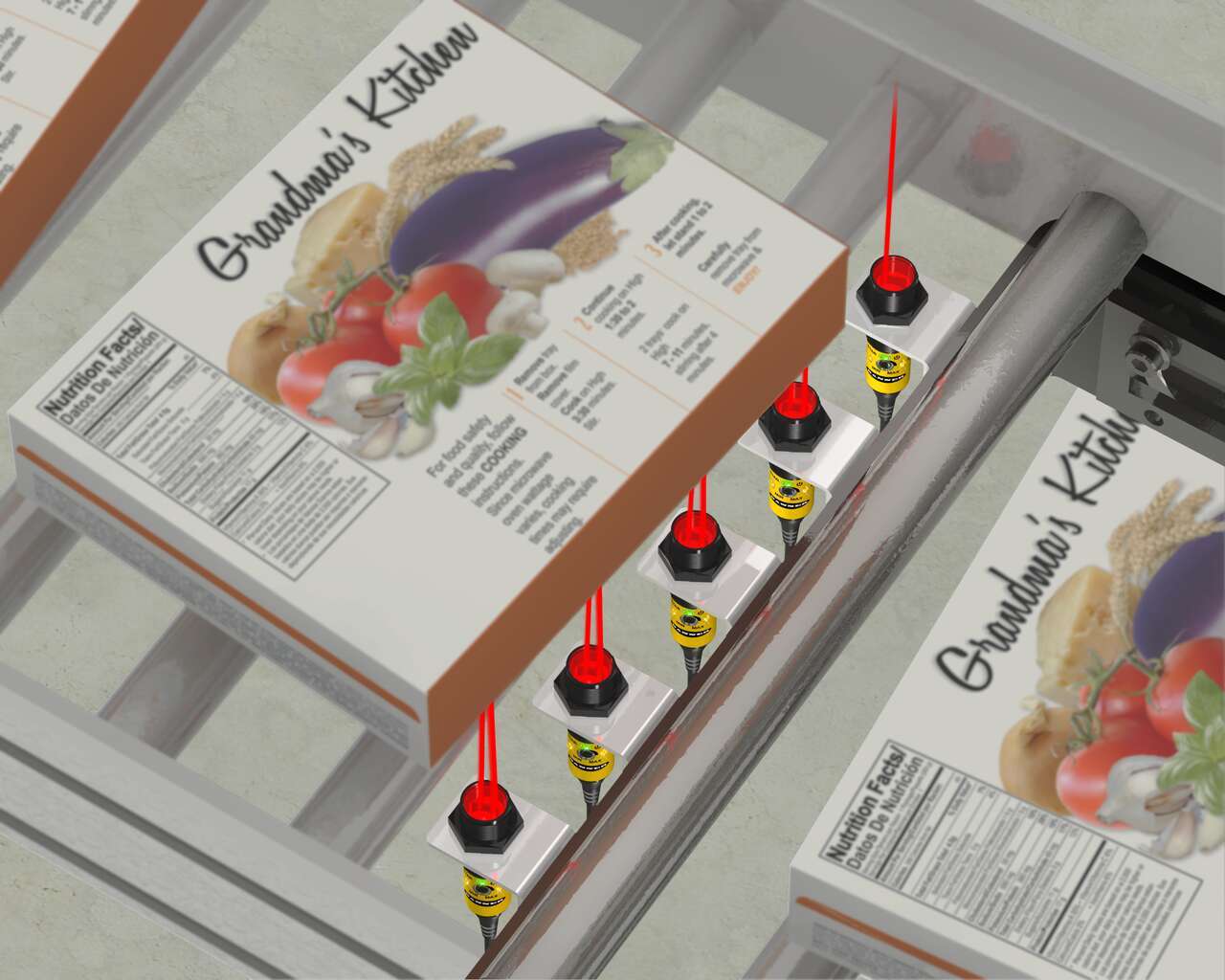
正確な梱包のための食品カートンの計数
-

日付/ロットコード印刷のためのカートンのトリガ
-
色の分類
-

コンベア詰まりの検出
-
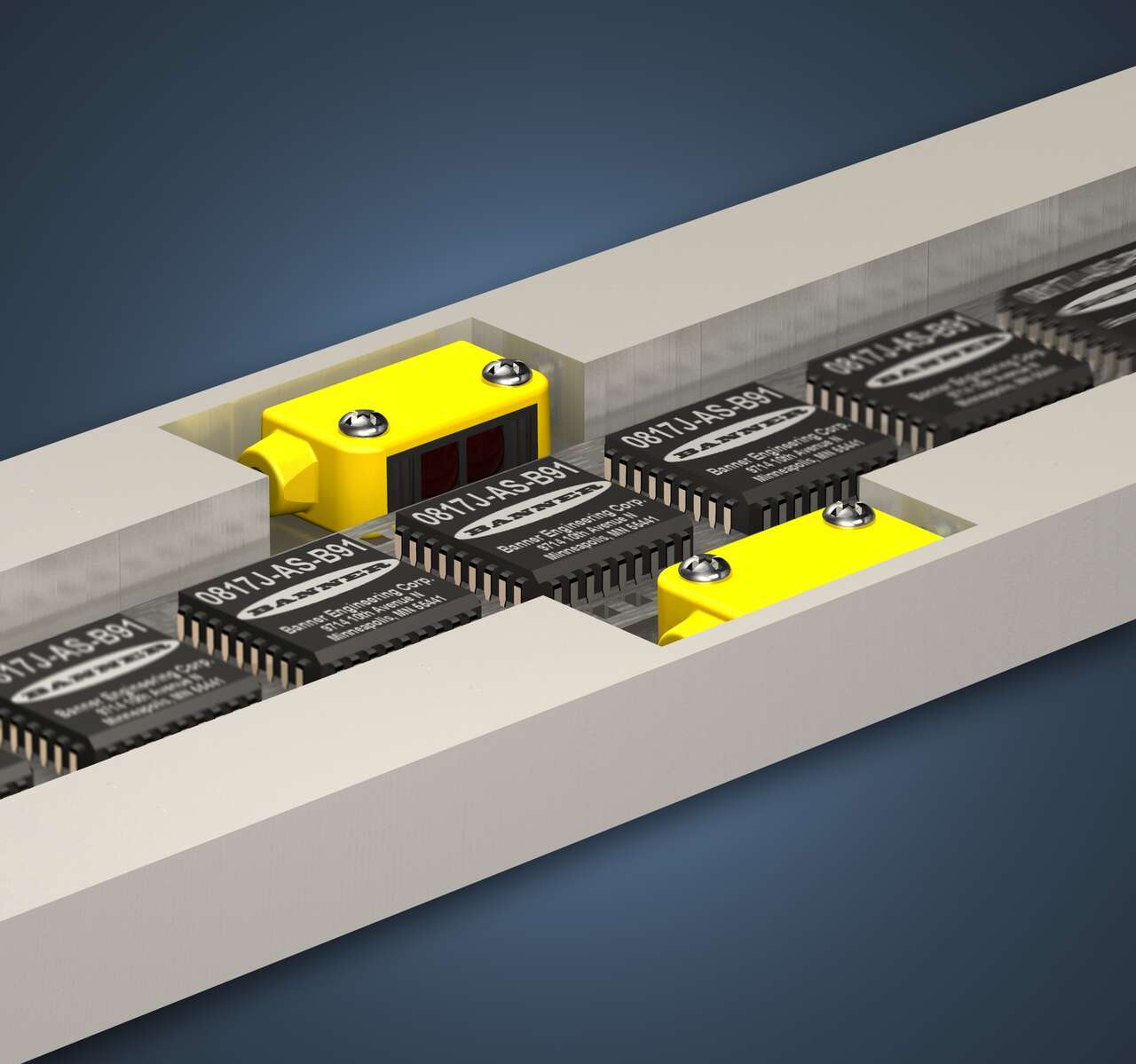
集積回路の計数
-
メモリスティックのカウント
-

伸長式リーチコンベア
-

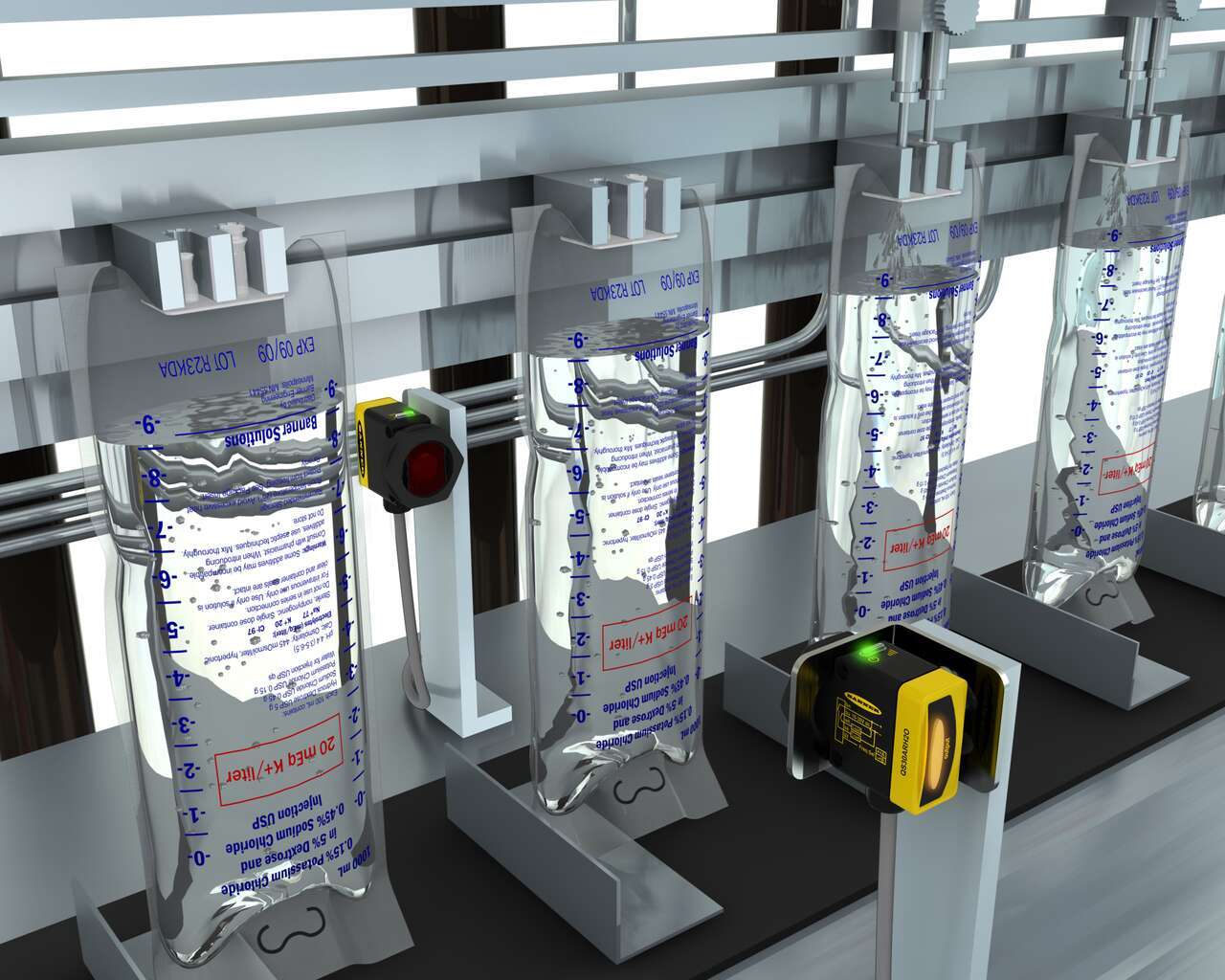
水容器の充填レベル検証
-
印刷時の検査トリガ
-

ジュースのカートン検出
-
QS18による液漏れ検出
-
Load Station Pallet Detection
-

サイズごとの郵便物の仕分け
-

充填のための薬品瓶の検出
-

トレイシーラー内の透明フィルムの監視
-
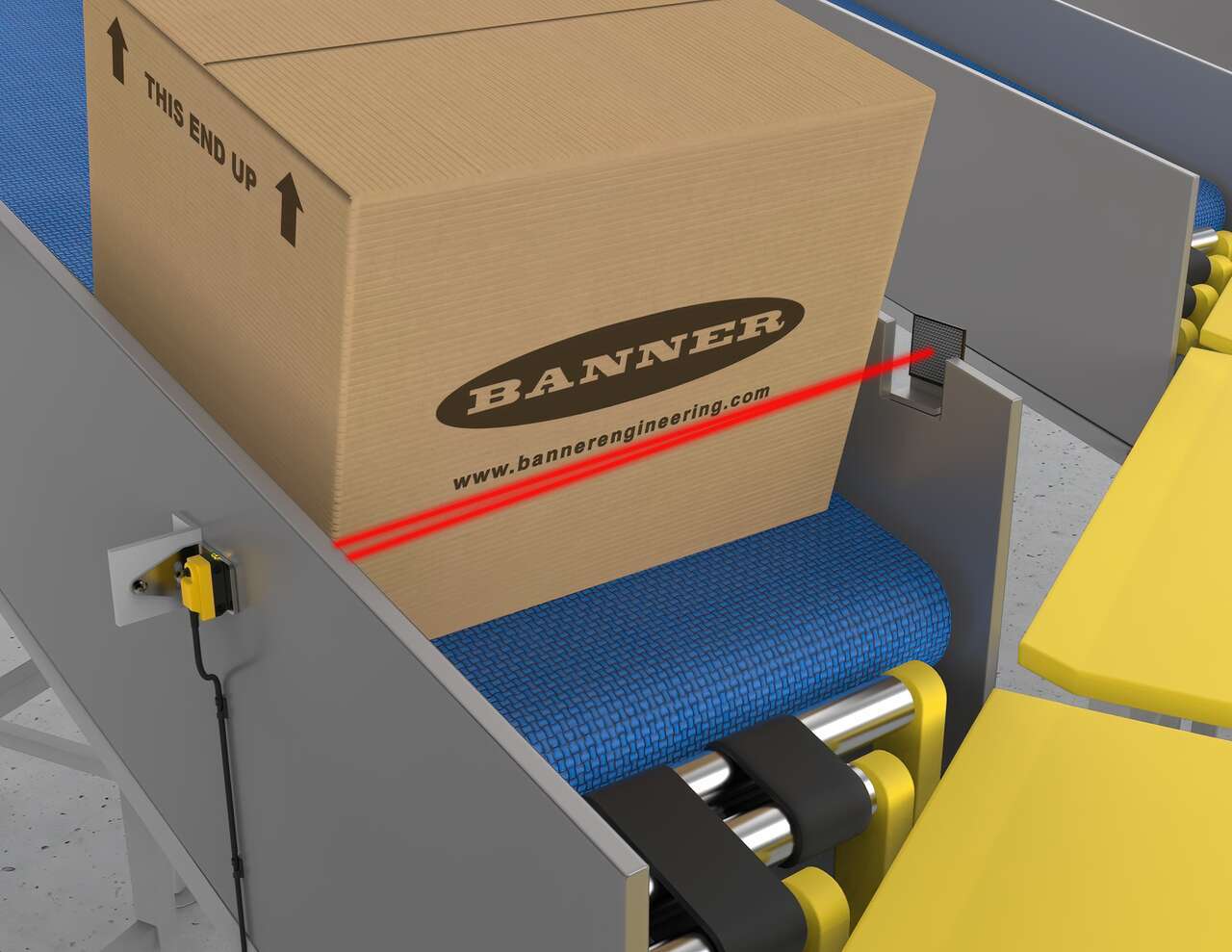
コンベア上の物体
-

荷物衝突回避
-

フィーダーボウル内の部品検出
-
シャトルトートの位置決め
-
仕分け自動誘導ステーション
-
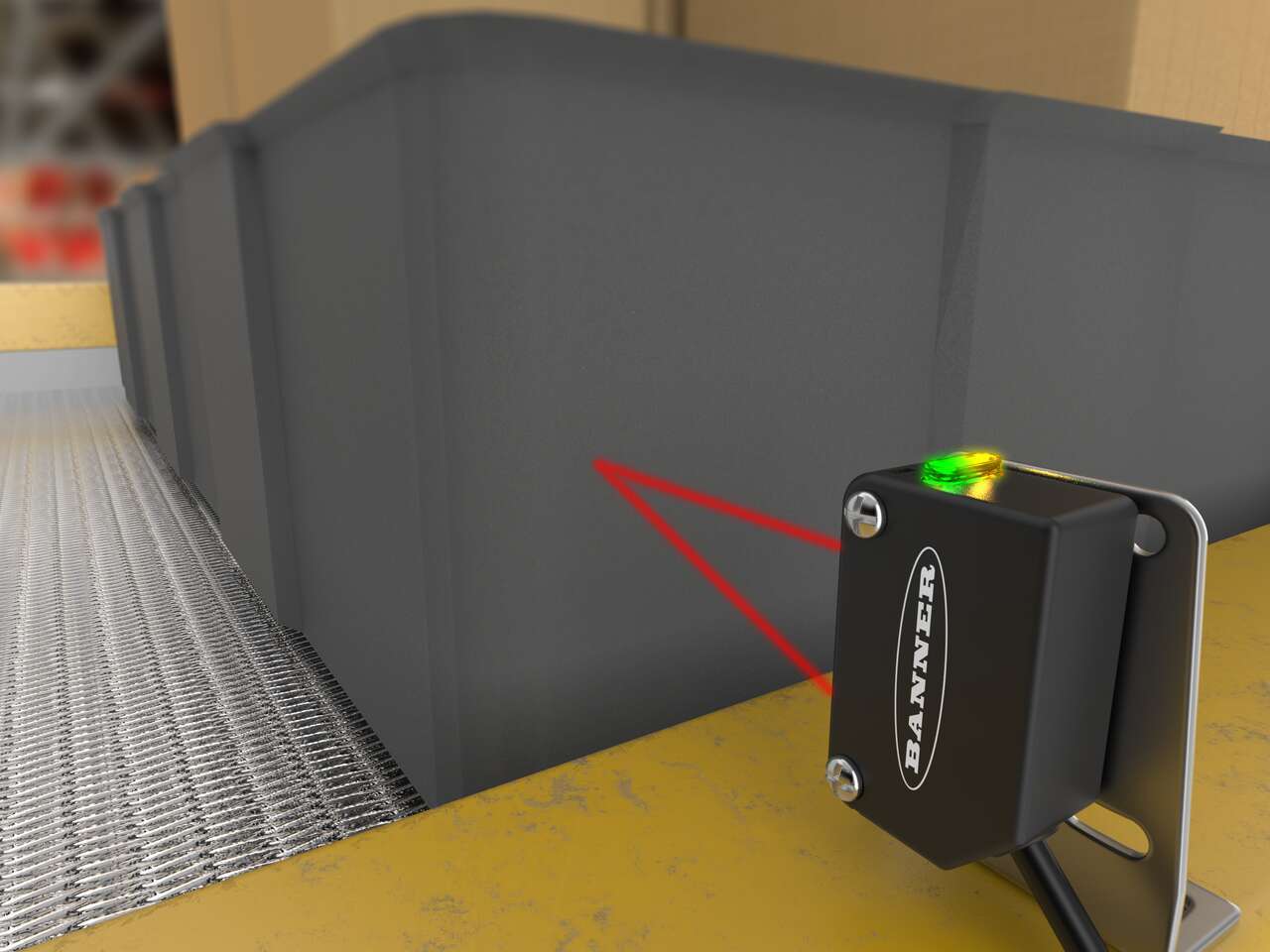
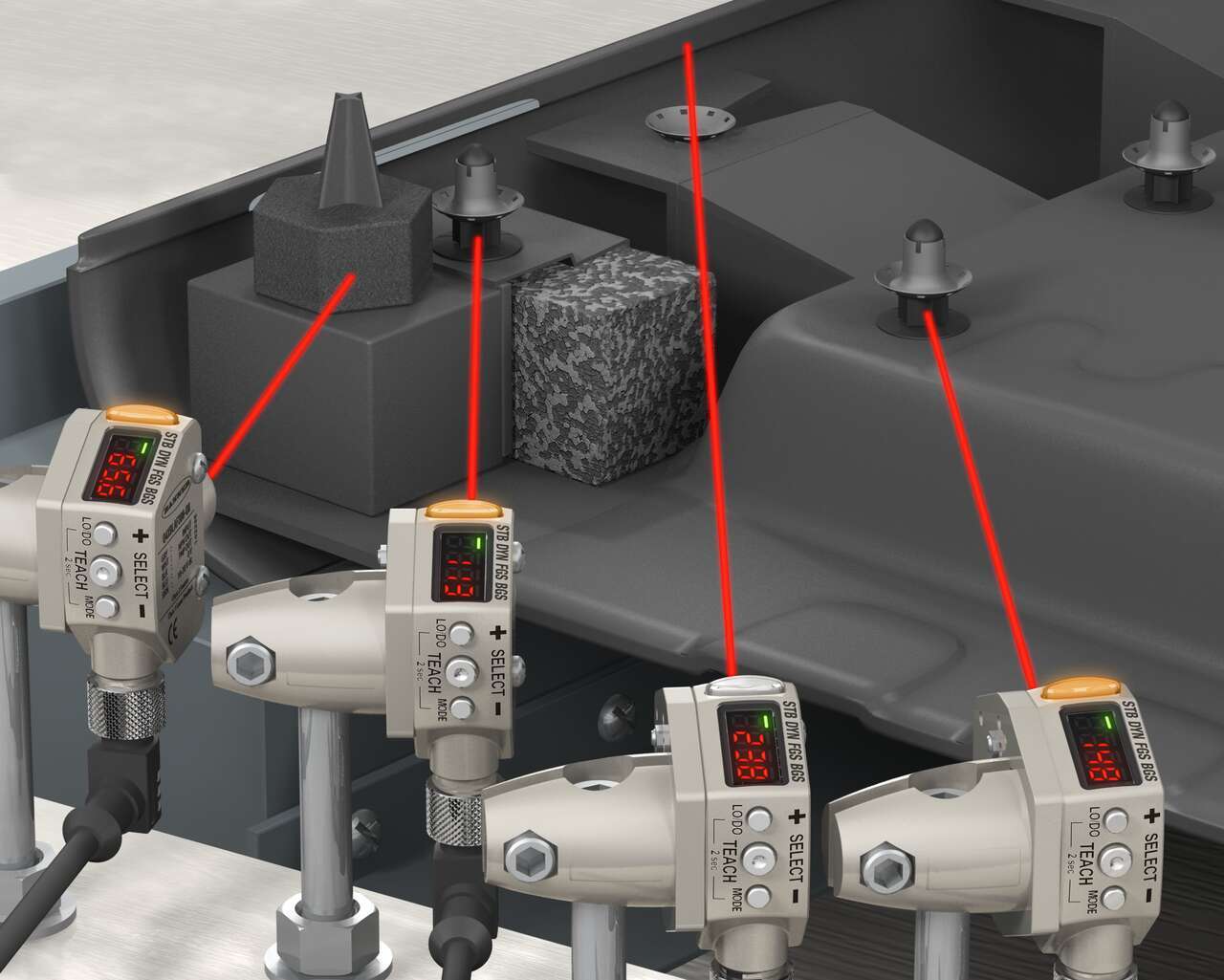
金属部品のスタック高検出
-
黒いドアパネルの黒い部品の検出
-
キャップの向きの検出
-
加工冷凍食品の折ぶたの検出
-

部品位置の確認
-
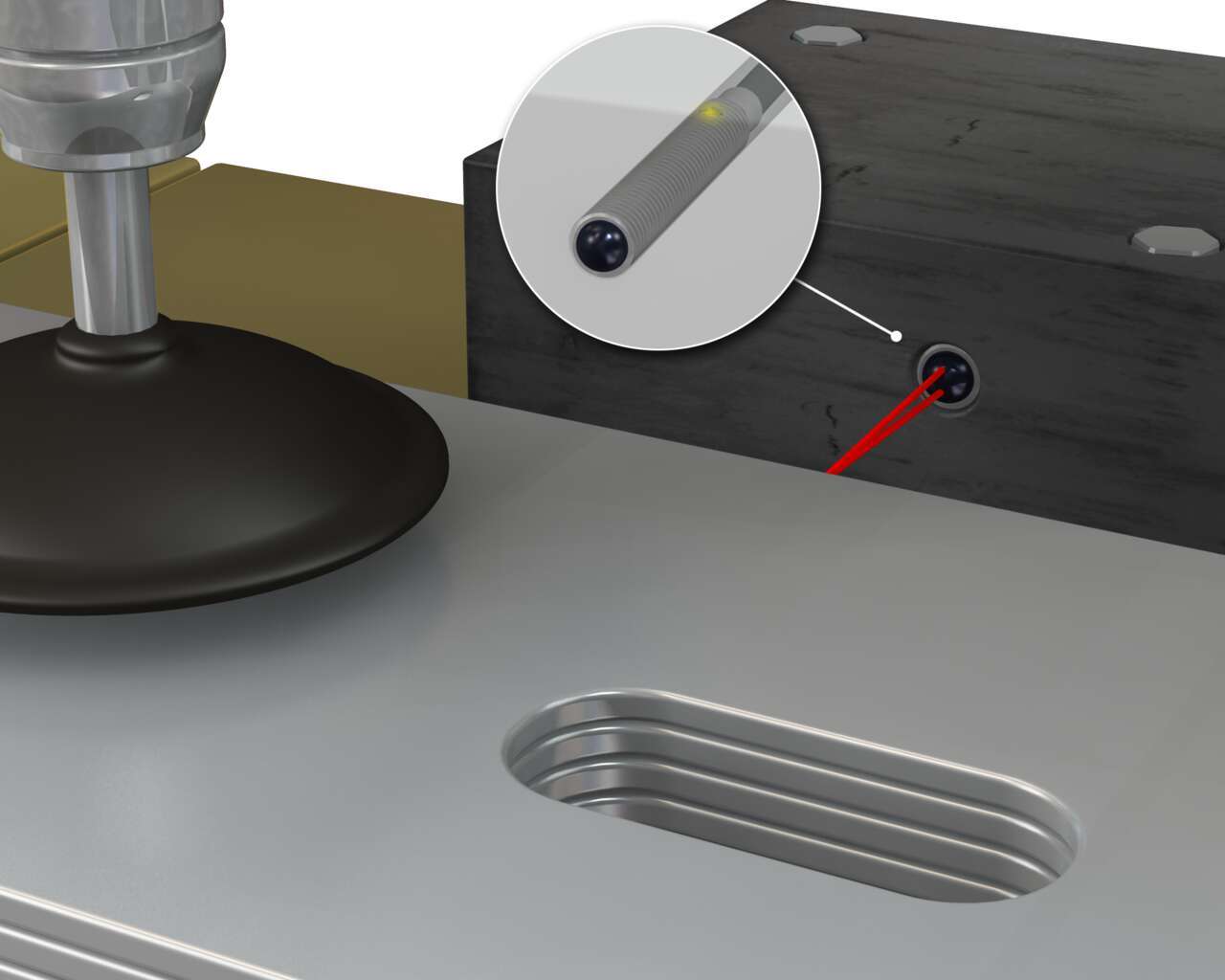
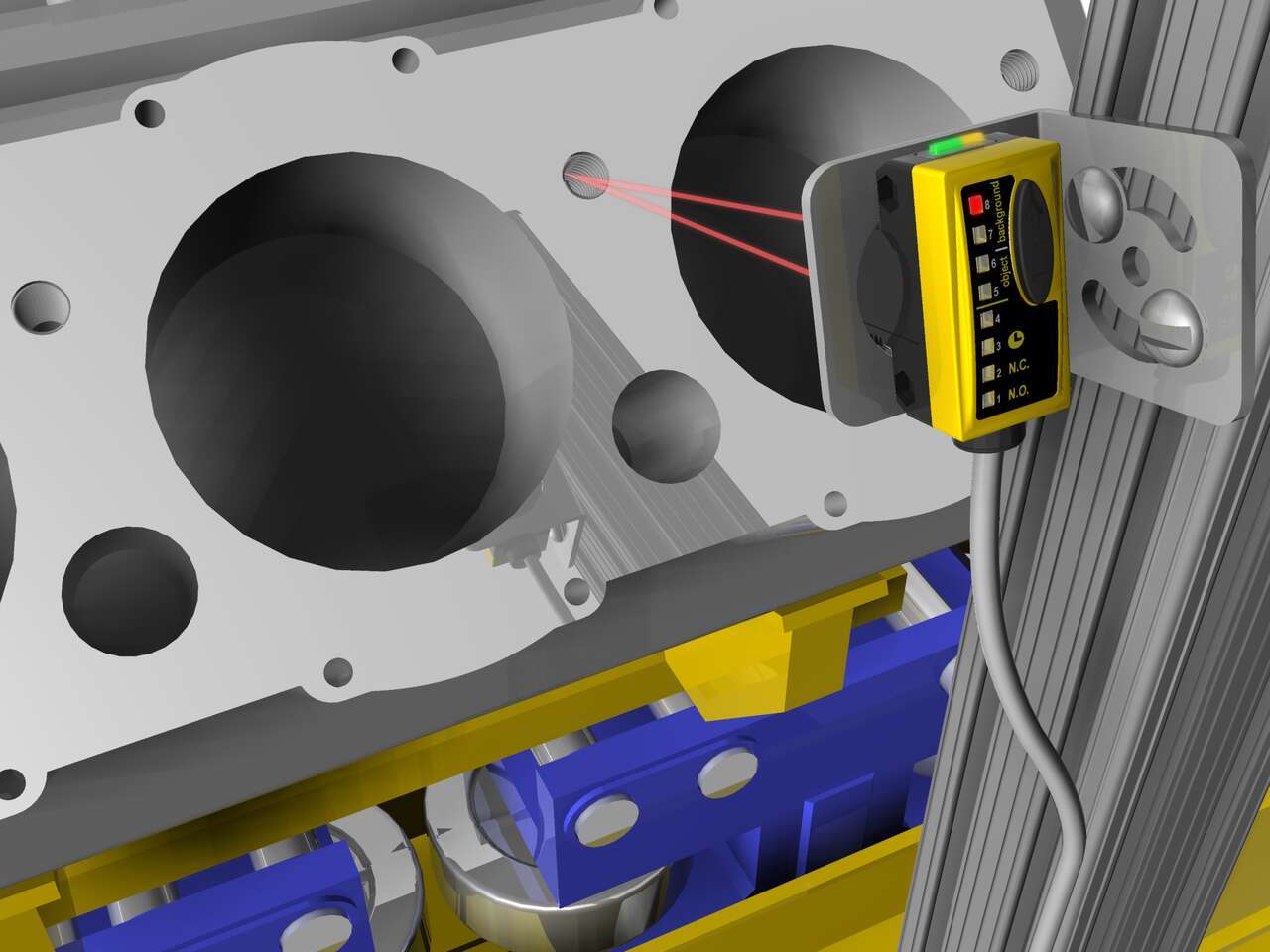
エンジンブロックのゴム製ワッシャの検出
-
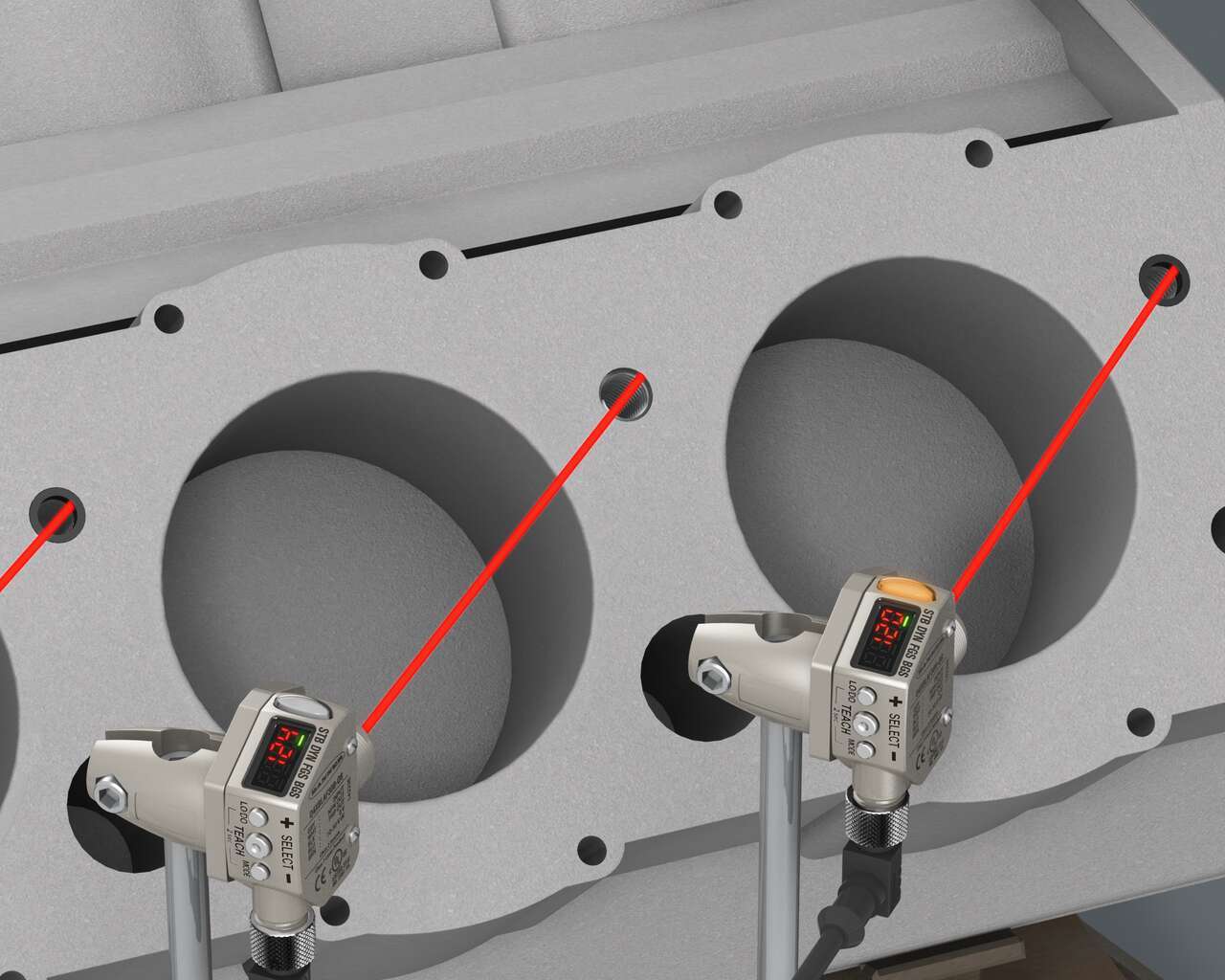
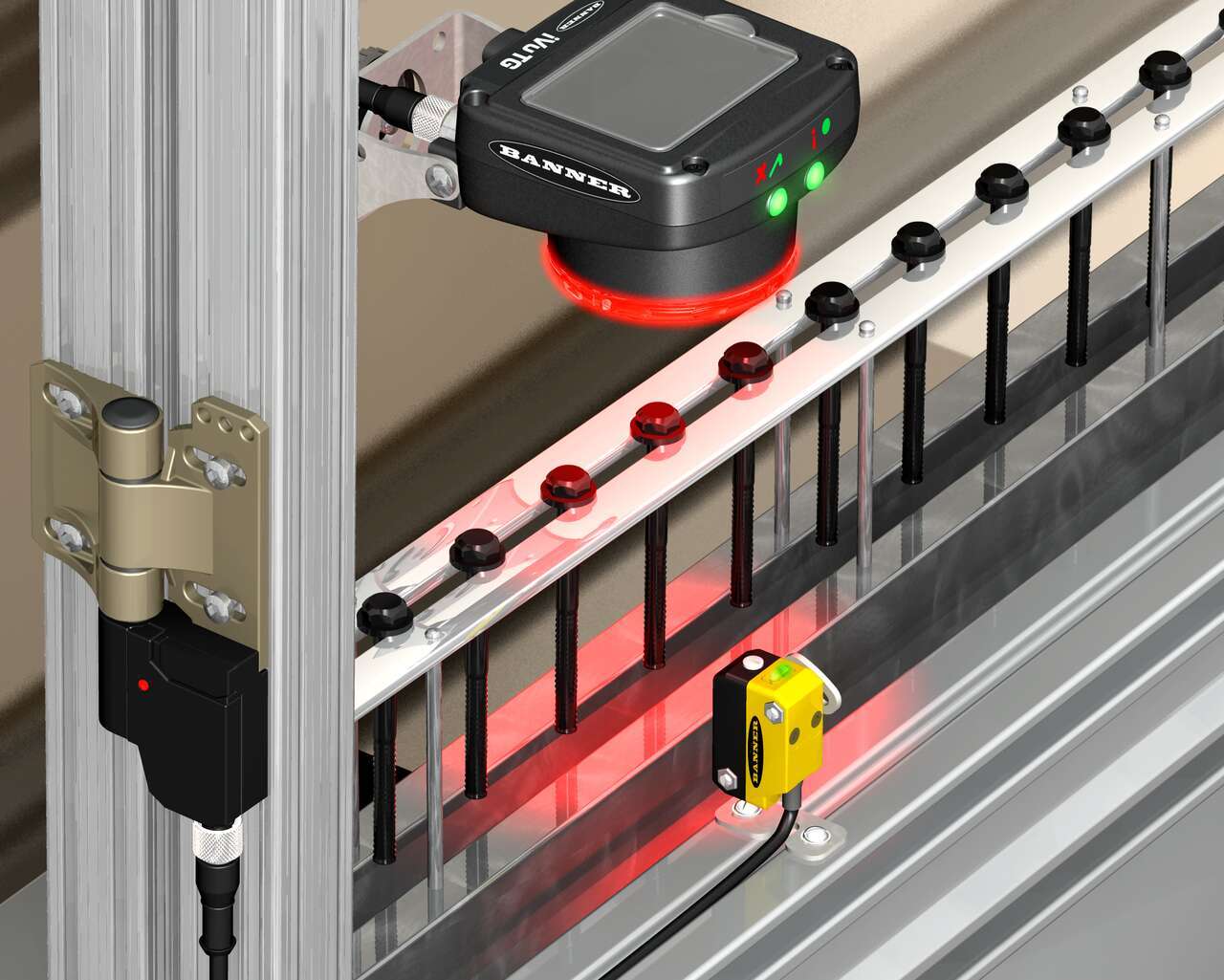
ねじ穴の検出
-

反射性リングのカウント
-
過酷な化学薬品環境でガラスバイアルを検出するための衛生的なセンサ
-
長距離特徴検出
-
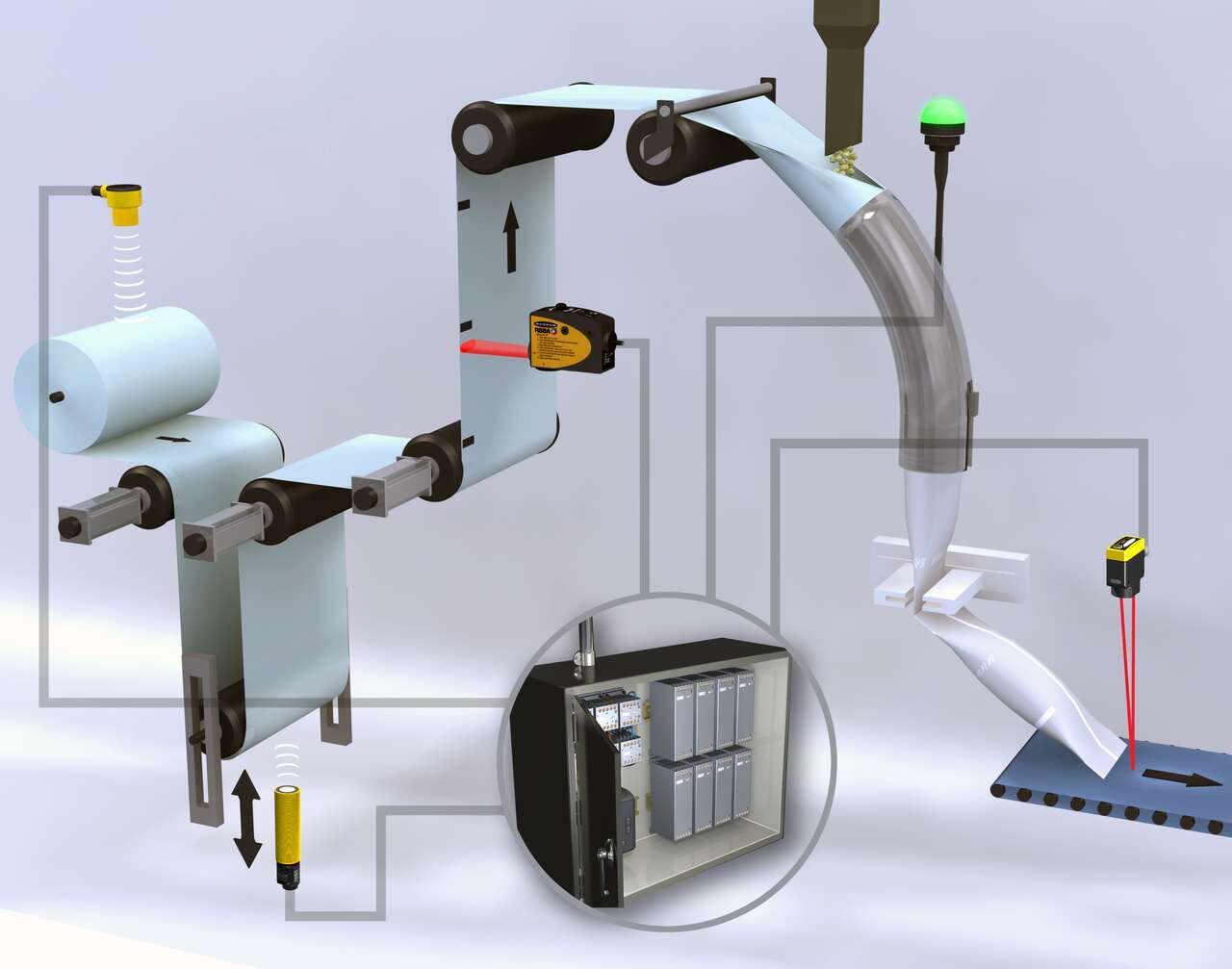
縦型製袋充填機のソリューション
-
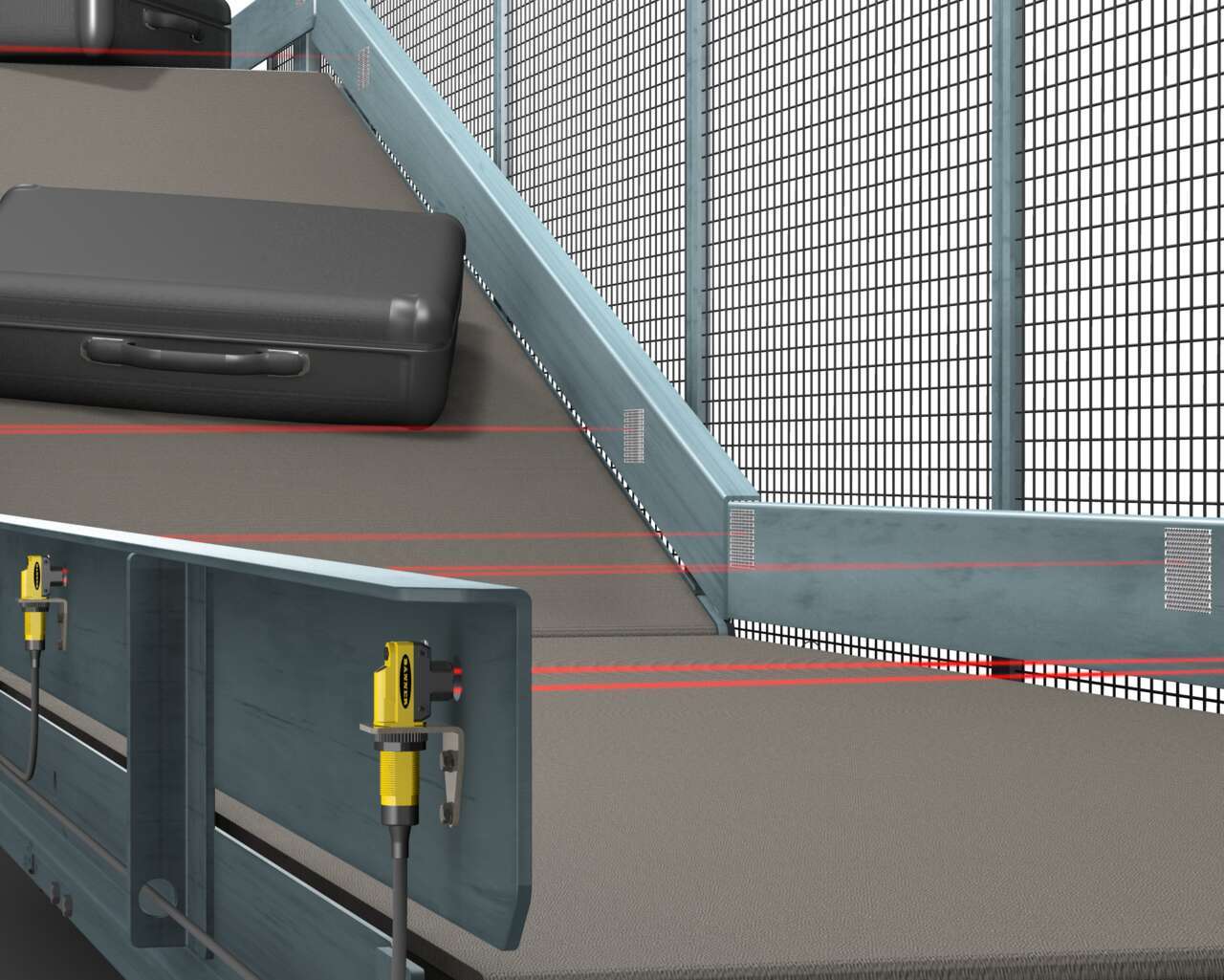
手荷物の取り扱い
-
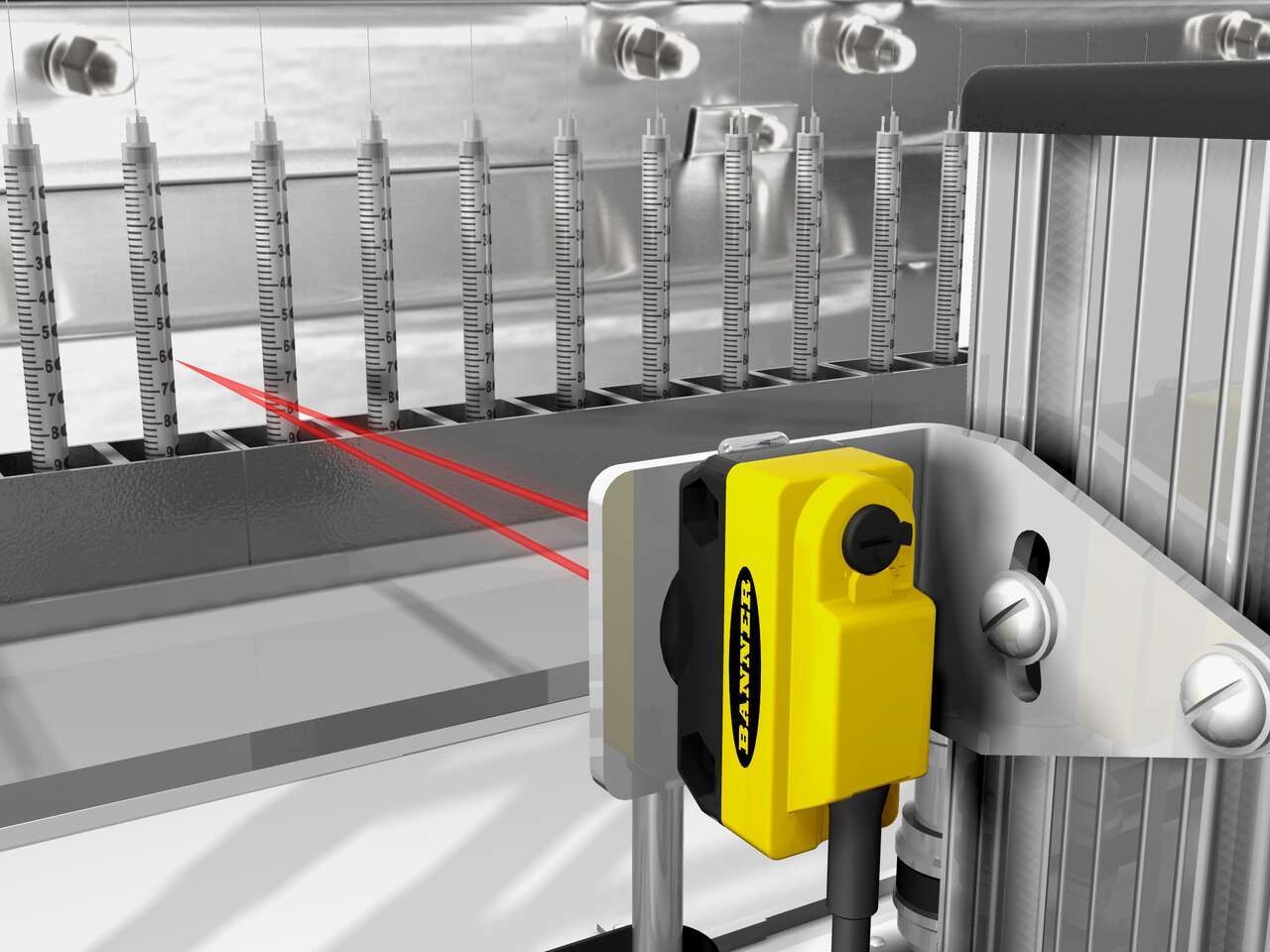
背景抑制を使用した注射器の計数
-
コンベア上の異なるサイズのパッケージの検出
-
ガラスパネルの検出
-

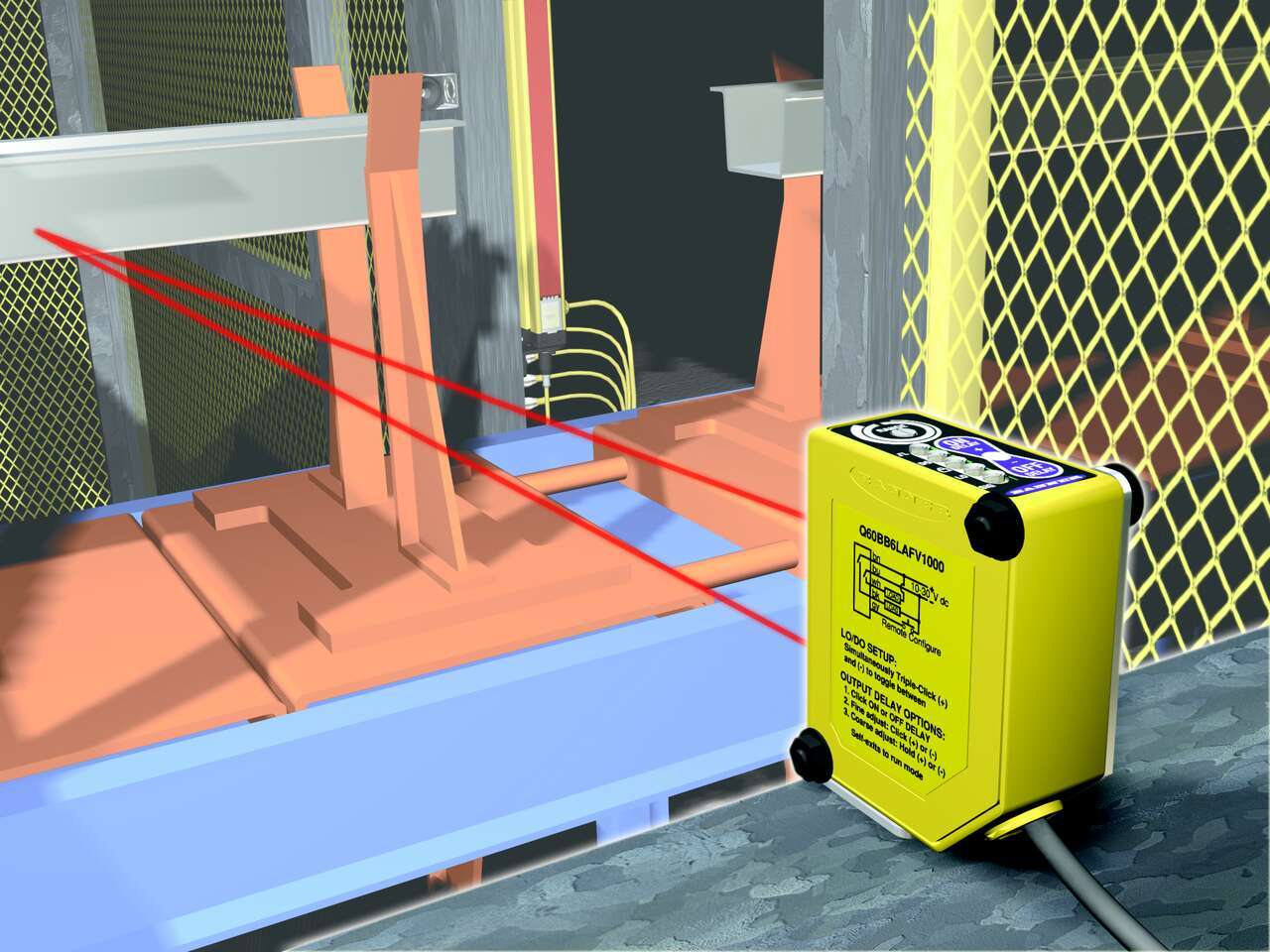
AC電源コンベヤでの物品の検出
-

モーターの検出
-
炭酸飲料缶の流れの制御
-
組み立てプロセス中のPCBアセンブリの接着剤の検出
-
黒Oリングの検出
-

ハードディスクの検出
-
フィーダーボウルレール上の部品検査
-
プレス加工におけるシートメタルの確認
-

遮光および低コントラストのターゲット
-
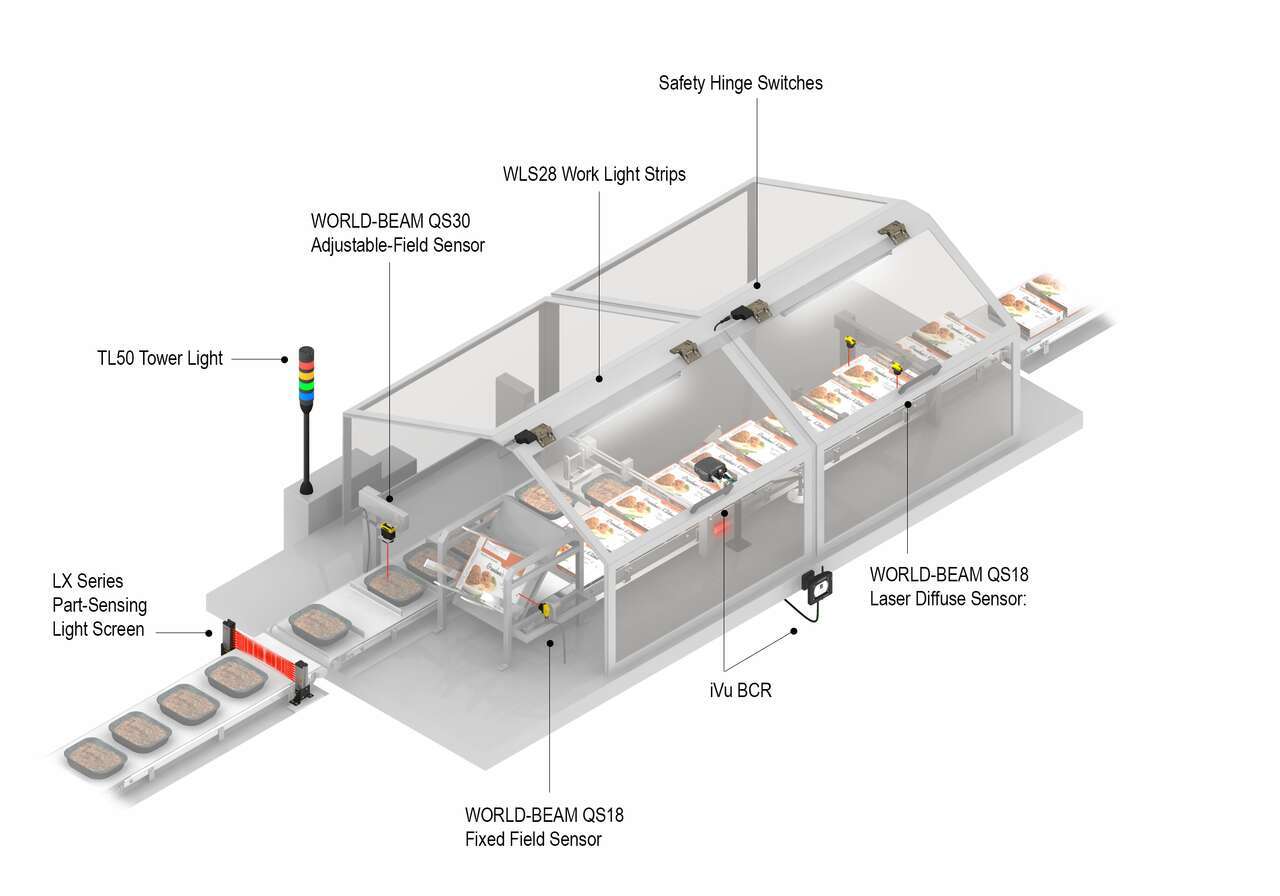
箱詰め機での冷凍食品の梱包
-

出口シュートの詰まりの表示
-

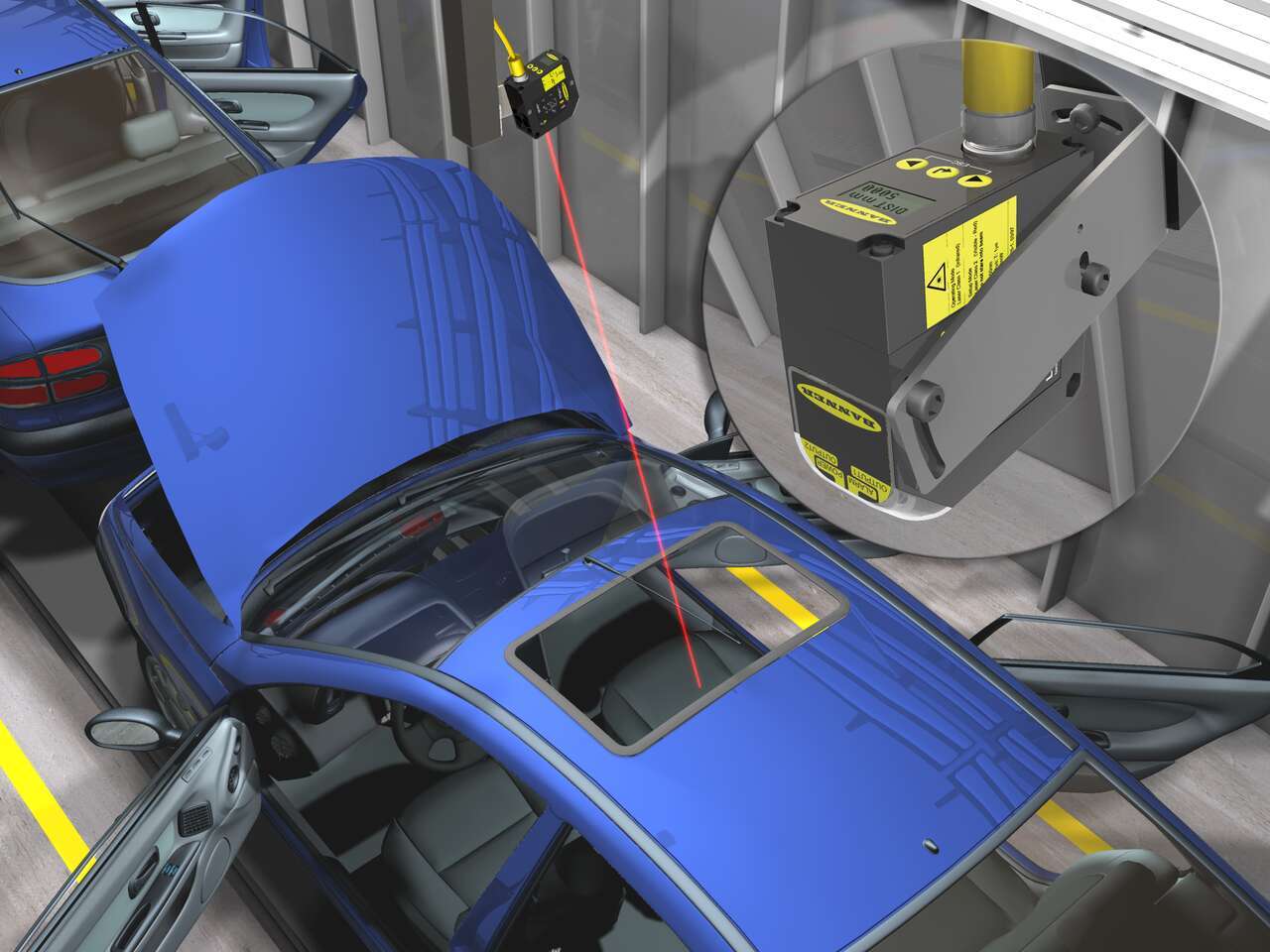
洗車
-

自動洗車機の極端な環境における車両位置
-

透明で反射性のあるターゲット
-

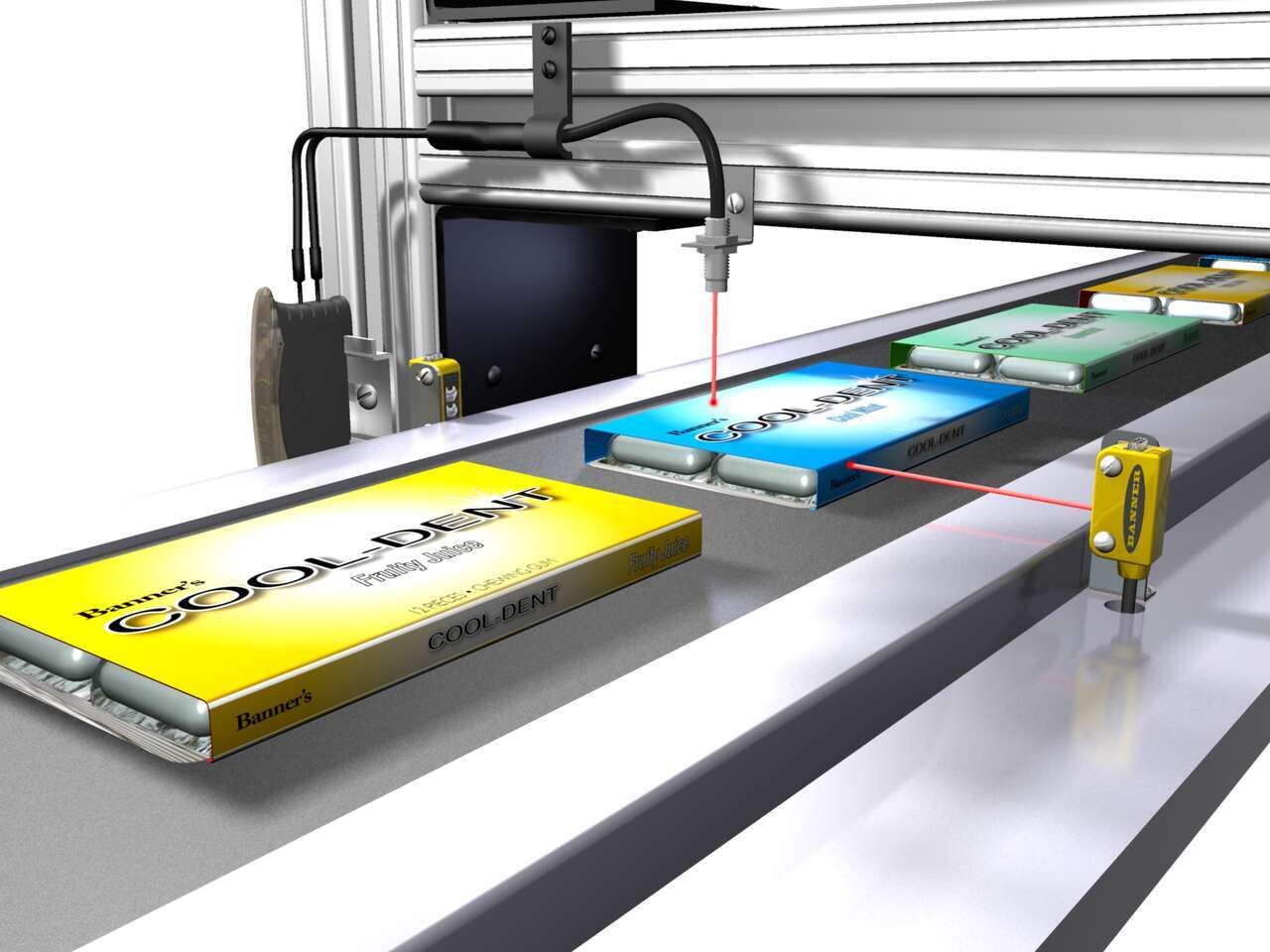
多色包装
-

食料品および飲料品の飛沫範囲での透明ガラスジャーの検出
-

洗浄環境での透明ボトルの検出
-

コンベア上の反射性パッケージの検出
-

デネスターでの透明な食品トレイのラインプレッシャー管理
-
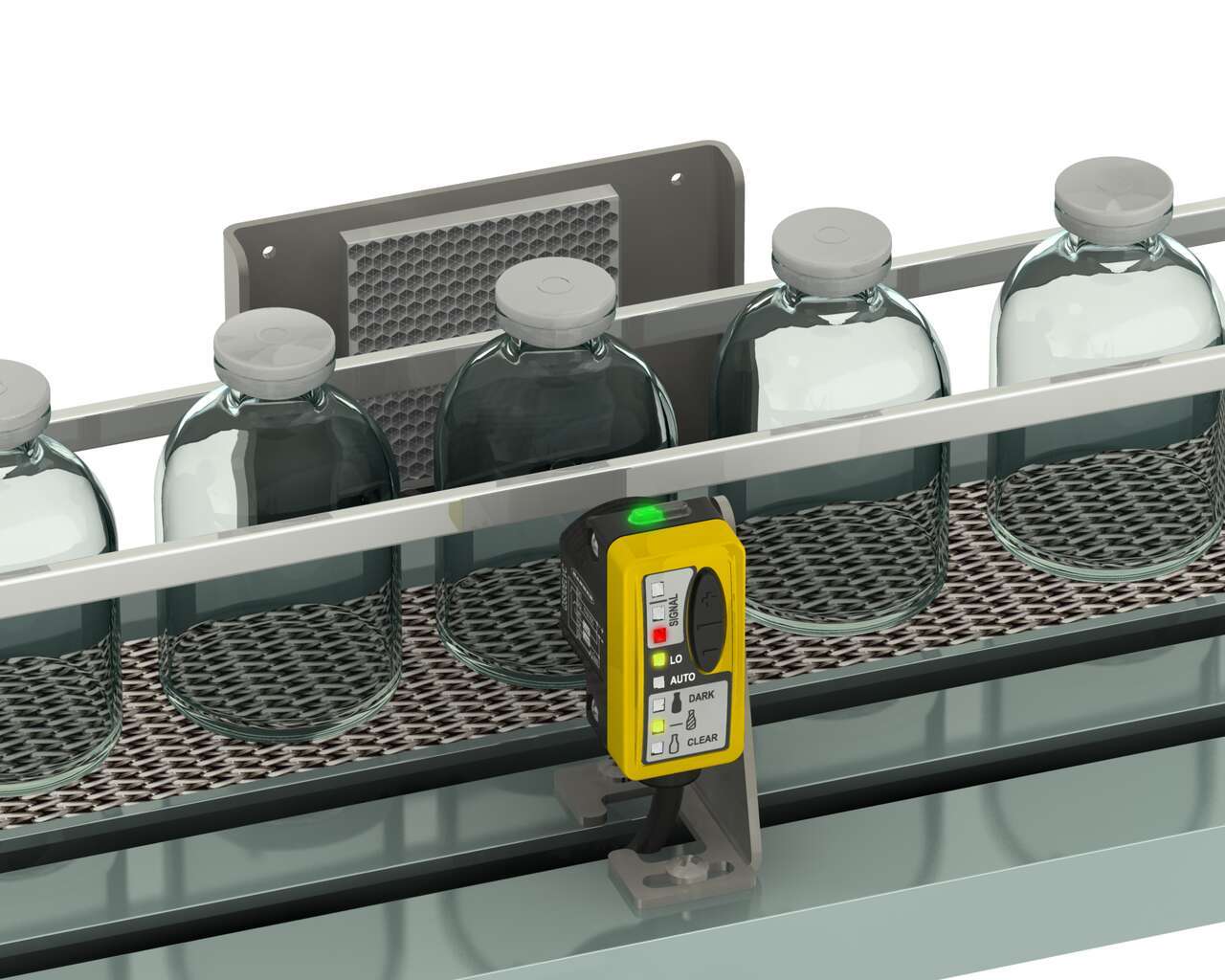
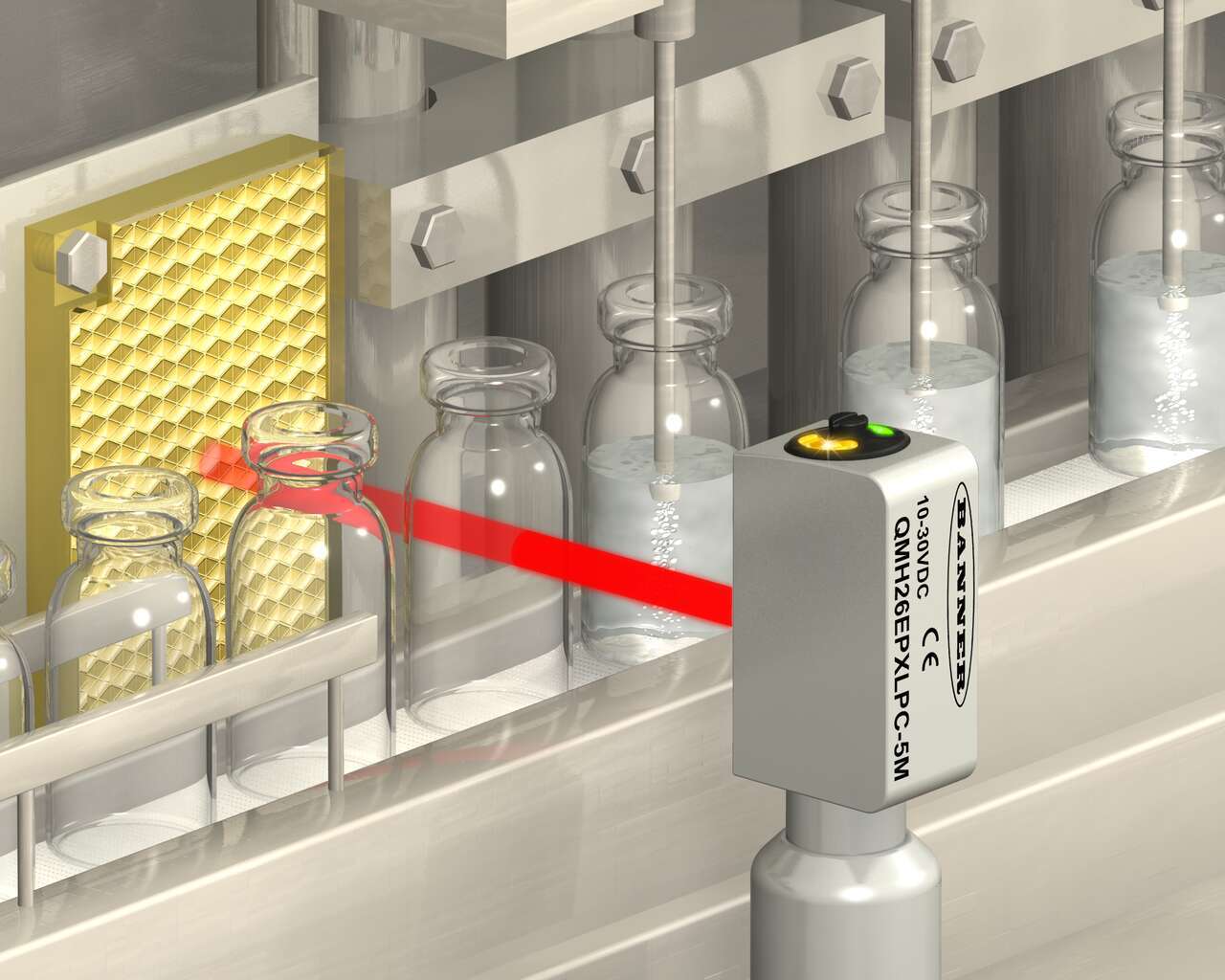
透明な薬瓶の正確な計数
-
透明なパッケージに入った透明な液体の検出
-
食品貯蔵ユニットホッパーでの透明トレイの検出
-
衛生環境での透明プラスチック食品容器の検出
-
洗浄環境での透明なガラスおよびプラスチック製ペットボトルの検出
-
シングルファイラでのインライン集積
-

ペットボトルを検出して製品の流れを調整
-
コンベア上の透明なプラスチック容器のカウント
-
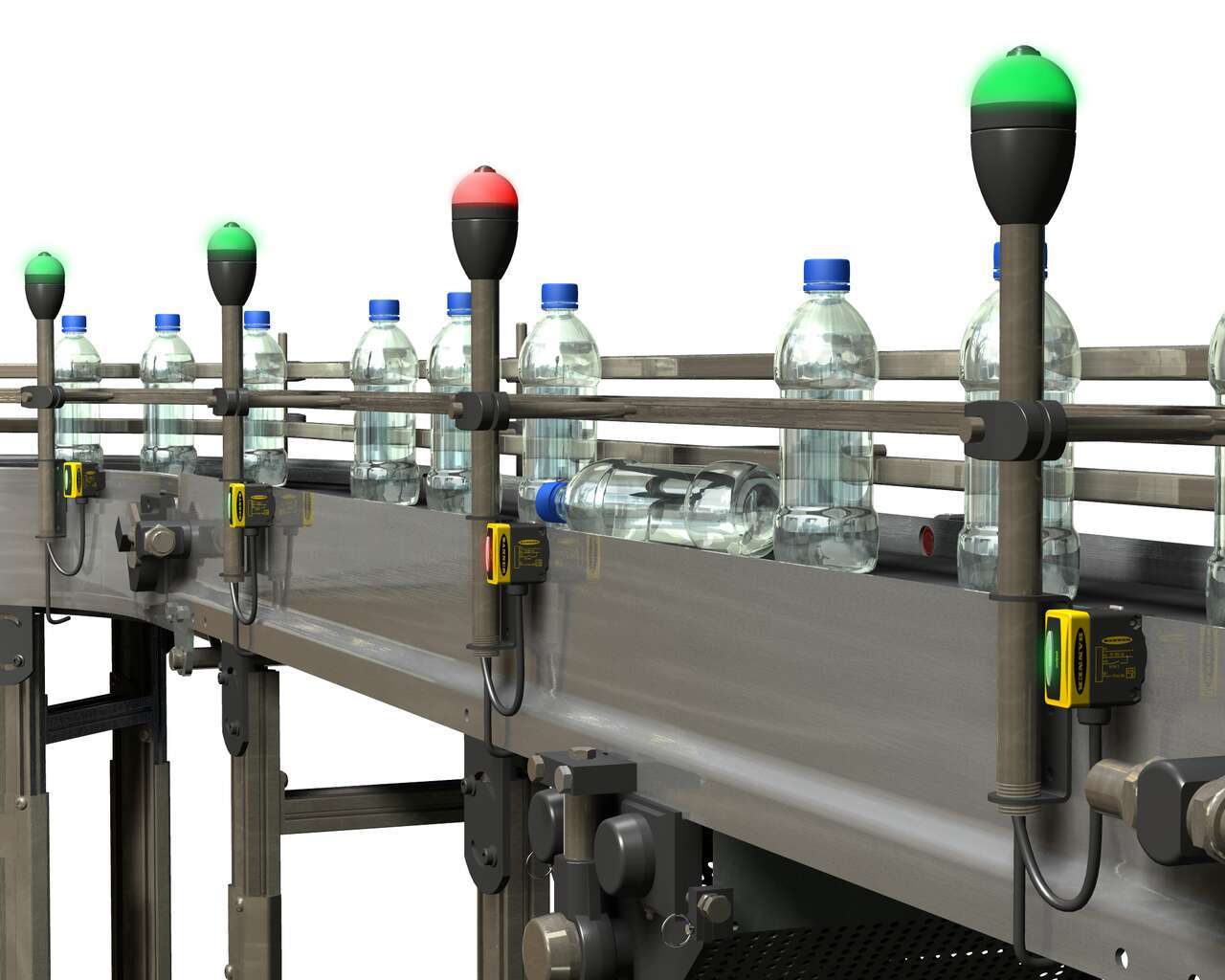
倒れたボトルの有無の検出および表示
-

高速ボトリングラインで倒れたボトルを検出
-
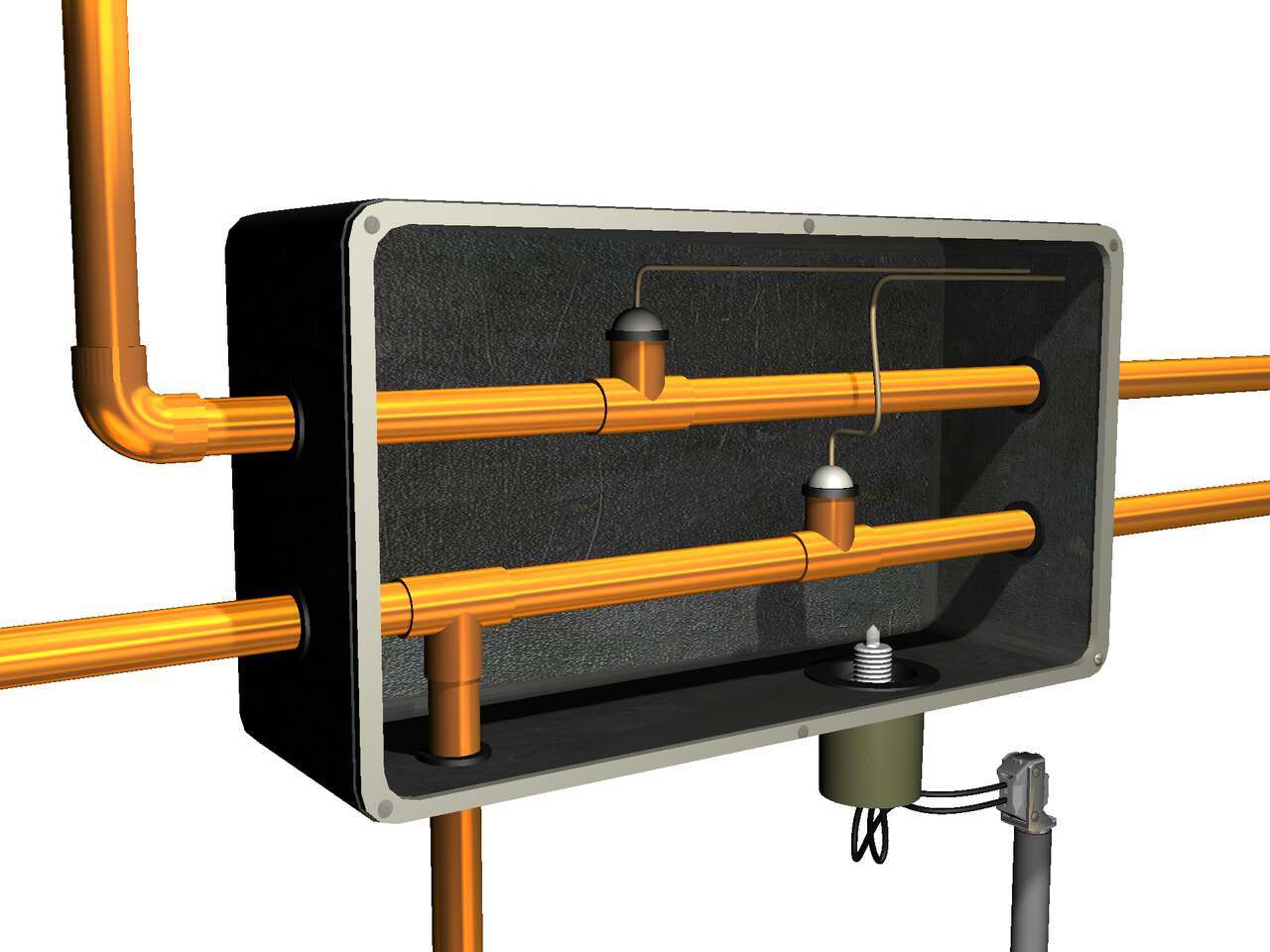
レベル測定
Resources
The latest Photoelectric Sensors Solutions brochure explores the many different types of Banner sensors and how to choose the right one for your application, whether it be object counting, quality control, object presence or absence, or other automation need.
